9-Бөлүм: Жандууларды Туураган Роботтор
Терең деңиз, океандын түбү, радиоактивдүү аймактар же космос мейкиндиги сыяктуу жерлер адамдардын иштеши үчүн дайыма рисктүү аймактар болуп келүүдө. Өнүккөн электрондук жана компьютер технологиясы ушул сыяктуу жерлерде жумуш жасай алган жана робот деп аталган машиналарды жасоого мүмкүнчүлүк берди. Натыйжада робот илими да электроника жана механикадан бөлүнүп, «робототехника» аттуу жаңы бир илим тармагына айланды. Учурда роботтор менен алектенгендердин актуалдуу жаңы бир түшүнүгү бар: «биомиметикалык робототехника».
 |
Робот жасоо менен алектенген илимпоздор жана инженерлер эми жасаган жумушуна ылайыктуу роботторду долбоорлоо анчалык ыңгайлуу эмес деп ойлошууда. Ошондуктан жумуш жасала турган чөйрөдө жашаган бир жандыкты же ал жандыктын бир өзгөчөлүгүн туураган роботторду жасоону акылдуу жана оңой жол дешүүдө. Мисалы, чөлдө жасала турган бир ачылыш үчүн чаянга же кумурскага окшогон, деңиз түбүндөгү бир изилдөө үчүн болсо балыкка же омарга окшогон бир робот жасоо сыяктуу... «Биомиметикалык робототехниканын» изилдөө чөйрөсүнө ушундай роботтор кирет. «Neurotechnology for Biomimetic Robots» (Биомиметикалык роботтор үчүн нерв технологиясы) аттуу китепте бул жөнүндө мындай деп айтылат:
Биомиметикалык роботтор ыкчам, арзаныраак жана чыныгы дүйнө шарттарын аша алганы үчүн кадимки роботтордон айырмалуу. Бул роботтордун инженериясы биологиялык системалардын биомеханикалык жана физиологиялык деңгээлдерде түшүнүлүшүнө таянат.
...Түпкү максат – адам операторлорго муктаж болбостон, бир гана сезгичтик реакцияга таянып, айланасы менен байланыш кура алган жана багытын таба алган өз алдынча бир робот өндүрө алуу.130
Илимпоздорду табияттагы жандыктарды тууроого түрткөн нерсе – бул алардын кемчиликсиз дене долбоору. «Karlsruhe колу» катары таанылган робот колун жасаган Ганс Шнибели (Hans J. Schneebeli) бул жөнүндө мындай дейт:
Робот колдор багытында эмгектенген сайын адамдардын колдоруна таң калуум артууда. Адам колу жасаган жумуштун бир бөлүгүнө эле жете алышыбыз үчүн дагы көп убакыт өтүшү керек.131
Кээде бир жандыктын жалгыз бир өзгөчөлүгүн эле туурай алуу үчүн компьютер, механика, электроника, математика, физика, химия жана биология сыяктуу илим тармактарынын алдыңкы илимпоздору биргелешип иштеши керек болууда. Бирок эволюционист көз-караш абдан татаал бир системага ээ жандыктар бир пландоо болбостон, өзүнөн өзү пайда болушу мүмкүн деген догманы дагы эле жактоодо.
 |
 |
 |
Робототехника Илими Тең Салмактуулук Көйгөйүн Жеңүү Үчүн Жыландарды Туурап Жатат
Робот илими менен алектенгендер эң көп жолуккан көйгөйлөрдүн бири – бул тең самактуулук. Эң акыркы технологиялык жабдыктар менен жасалган роботтор да басып баратканда кээде тең салмактуулуктарын жоготуп алышууда. 3 жаштагы бир наристе эч кыйналбастан жасай алчу «тең салмактуулукту кайрадан куруу» өзгөчөлүгүнө ээ болбогон роботтор натыйжада пайдасыз болуп калууда. НАСА Марс кызматы үчүн даярдаган бир робот ушул көйгөй себебинен эч колдонула алган эмес. Робототехника адистери натыйжада тең салмактуулук камсыздоочу бир система куруу ордуна тең салмактуулугу эч бузулбаган бир жандыкты, жыландарды туурап, көйгөйдү чечүүгө аракет кылышкан.
Жыландардын денелери башка жандыктар кыла албай турган абалда, тешик жана жарыктарга кире ала турган болуп жаратылган. Омурткалуулар сыяктуу катуу скелеттери жана органдары жок. Денелеринин чоңдугун чоңойтуп, кичирейте алышат. Бутактарга оролуп, аска-таштардын үстүнөн өтө алышат. Жыландардын мындай өзгөчөлүктөрү НАСА изилдөө борбору тарабынан иштелип чыккан жана «snakebot» деп аталган бир адамсыз космос инструментине илхам болгон. Долбоорлонгон бул жылан-роботто роботтун эч бир тоскоолдукка токтобостон, дайыма тең салмактуулук менен алдыга жылышы максатталган.132
 |
 |
Ички Кулактагы Тең Салмактуулук Борбору Робототехника Адистерин Таң Калтырууда
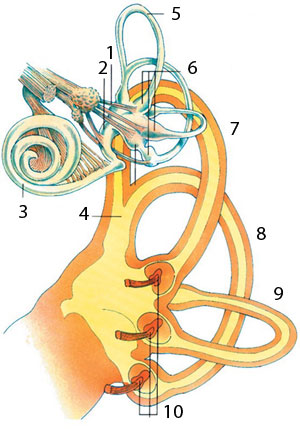 |
1. Ampullary nerves 6. Ampullae |
Бүт денебизди дайыма тынымсыз көзөмөлдөгөн жана жип үстүндө баскан бир акробат муктаж болгон тактыкта жөнгө салууларды жасай алган тең салмактуулук системабыздын маанилүү бир бөлүгү ички кулакта жайгашкан.
Ички кулактагы бул тең салмактуулук борбору «лабирент» деп аталат. Лабирент ар бири жарым айлана абалындагы үч кичинекей сөөктөн турат. Бул сөөктөрдүн ичи бир колба сыяктуу бош. Жарым айланалардын чоңдугу 6,5 миллиметр, ичиндеги боштуктун, т.а. туурасынын чоңдугу болсо 0,4 миллиметр. Үч жарым айлананын ар бири абдан өзгөчө бурчтар менен бири-бирине байланышкан. Бул бурчтар изилденгенде, ар бир жарым айлананын үч өлчөмдүү геометриянын негизи болгон x, y жана z координаттарына туура келээри аныкталган.
Лабирентте жайгашкан бул үч жарым айлананын ар биринин ичинде атайын бир суюктук бар. Бул суюктуктун ичинде сүзүп жүргөн бетте да түкчөлүү клеткалар бар. Биз башыбызды оңго-солго бурганыбызда, басканыбызда же кандайдыр бир кыймыл жасаганыбызда, бул жарым айланалардын ичиндеги суюктук кыймылдайт жана түкчөлөрдү титирештирет. Түкчөлөрдөгү мындай титирешүү үлүлдөгүдөй түкчөлөр байланган клеткалардын ион тең салмактуулугун өзгөртөт жана электрдик импульс чыгарат.
Ички кулактагы лабирентте чыгарылган бул элетрдик импульстар лабиренттен чыккан нервдер аркылуу мээбиздин арткы тарабындагы «мээче» аттуу органга жиберилет. Лабиренттен мээчеге кабар ташуучу нервдер изилденгенде, булардын арасында 20 миң ар башка кичинекей нерв жипчеси бар экендиги аныкталган.
Мээче ички кулактагы лабиренттен келген бул маалыматтарды тынымсыз жоромолдойт. Бирок тең салмактуулукту камсыздоо үчүн башка маалыматтарга да муктаждык бар. Ошондуктан, мээче көздөрдөн жана дененин төрт тарабындагы булчуңдардан да тынымсыз маалымат алып турат. Бул маалыматтардын баарын абдан бат анализ кылат жана дененин жердин тартылуу күчүнө жараша абалын эсептейт. Андан соң болсо бул эсептөөгө таянып, булчуңдар кандай кыймыл жасашы керек экенин аныктайт. Натыйжа булчуңдарга кайра эле нервдер аркылуу буйрук катары билдирилет.
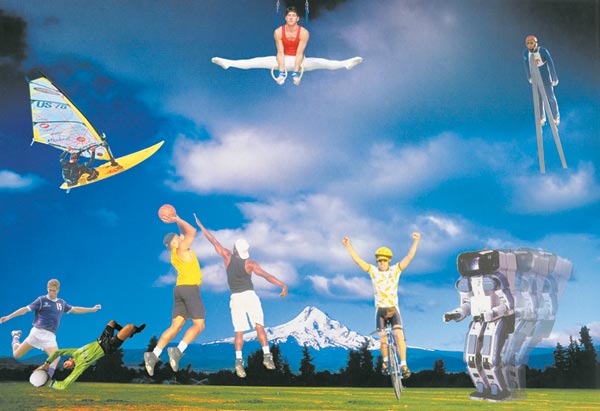
Мындай кереметтүү процесстер секунданын жүздө биринчелик да болбогон кыпкыска убакыт ичинде ишке ашат. Биз болсо ичибизде ишке ашкан бул кереметти эч билбестен, бейпилдик менен басып, чуркап, эң кыйын спорттук кыймылдарды жасайбыз. Чынында болсо бул кыймылдардын жалгыз бир көз ирмеми үчүн денебизде ишке ашырылган эсептөөлөрдү кагазга түшүрсөк, миңдеген беттик формула жазышыбыз керек болот.
 |
Balance is brought about by a most extraordinarily complicated system, since the human body is in constant motion. That means the brain must constantly recalculate the body's center of gravity, and send instructions to the muscles in light of this. |
Тең салмактуулук системасы – бул бири-бири менен абдан тыгыз байланыштуу көптөгөн комплекстүү механизмдин төп келишип иштеши менен ишке ашкан кемчиликсиз бир система. Заманбап илим жана технология болсо бул системаны тууроо мындай турсун, иштөө принциптерин да майда-бараттарына чейин толук аныктап түшүнө албады.
Албетте, мынчалык комплекстүү бир системанын эволюция теориясы догма кылгандай, кокустуктар натыйжасында пайда болушу мүмкүн эмес. Бул система Улуу Аллахтын бар экендигинин жана чексиз кудуретинин далилдеринин бири.
Бул чындыкты түшүнгөн бир адамдын милдети болсо ага мындай бир органды берген Аллахка шүгүр кылуучу болуу.
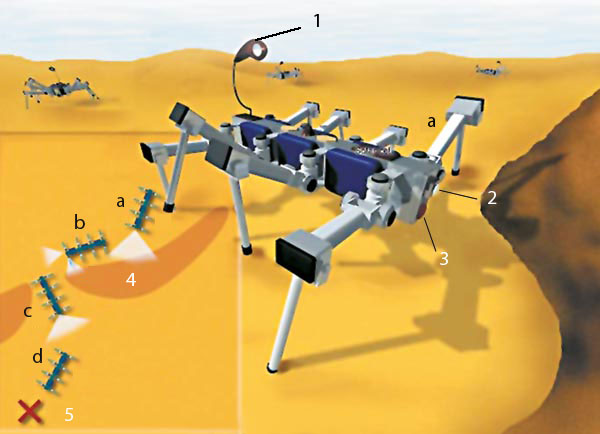
Чөлдүн Татаал Шарттарына Чыдай Алган Робот Чаян
АКШда кызмат кылган DARPA аттуу уюм эмгектенген долбоорлордун бири – бул робот чаян. Долбоордо чаян моделинин тандалышынын себеби – роботтун чөлдө иштей турган болушу. Чаян табиятынан абдан оор шарттарга ээ чөлдөрдө да жашай алат. Чаяндын тандалышынын дагы бир себеби – бул анын топуракта оңой гана алдыга жыла алышына карабастан, рефлекстеринин сүт эмүүчүлөрдүкүнөн бир топ жөнөкөй жана тууроого мүмкүн болушу.133
Изилдөөчүлөр роботту иштеп чыгуудан мурда чыныгы чаяндарды изилдөө үчүн көп убакыт коротушкан. Чаяндын бардык муундары ишаратталып, басышы эки камера менен тартылган.134
Андан соң бул чаяндын басуу учурундагы буттары арасындагы төп келишкендик жана координация чыгарылып, модель чаянга колдонулган.
Чаян долбоорунда роботтун милдети бир гана чөлдө 40 киллометр алдыда турган бир максатка кирүү жана кайра кайтуу. Бирок роботтун бул милдети эч бир көрсөтмө албастан, өз башынча жасашы максатталган.135
 |
 |
 |
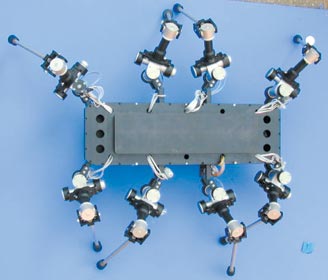
Boston North Eastern университетинен Франк Киршнер (Frank Kirchner) жана Алан Рудольф (Alan Rudolph) тарабынан долбоорлонгон 50 сантиметрлик чаяндын татаал көйгөйлөрдү чечүү жөндөмү жок. Робот чаян бир маселеге кабылганда, бир гана рефлекси менен кыймылдоодо. Бул аны токтото турган кандайдыр бир нерседен, мисалы бир ташка токтобостон өтүшүнө шарт түзүүдө. Роботтун алдында эки даана ультрасоник кабылдагыч бар. Эгер боюнун жарымынан жогору бир тоскоолдукка кабылса, айланасын айланып өтүүгө аракет кылат. Эгер сол тараптагы детектор бир тоскоолдукту аныктаса, автоматтык түрдө оңго багытталат. Бул роботтон белгилүү бир аймакка барып, куйругундагы камера менен базага сүрөт жөнөтүшүн да талап кылууга болот.
АКШ армиясы чаяндын Аризонадагы эксперименттеринен абдан таасирленген. Роботтун жолун табуу жөндөмүнүн өзгөчө шаарлар сыяктуу, тоскоолдуктарга толо болгон согуш майдандарында пайдалуу болоору үмүт кылынууда.136
 |
||
1. Camera and radio connections |
3. Infrared sensors |
5. Target |
a. When the robot scorpion encounters a rock, first it scans it with ultrasound to decide whether it's too high to climb. |
||
 |
|
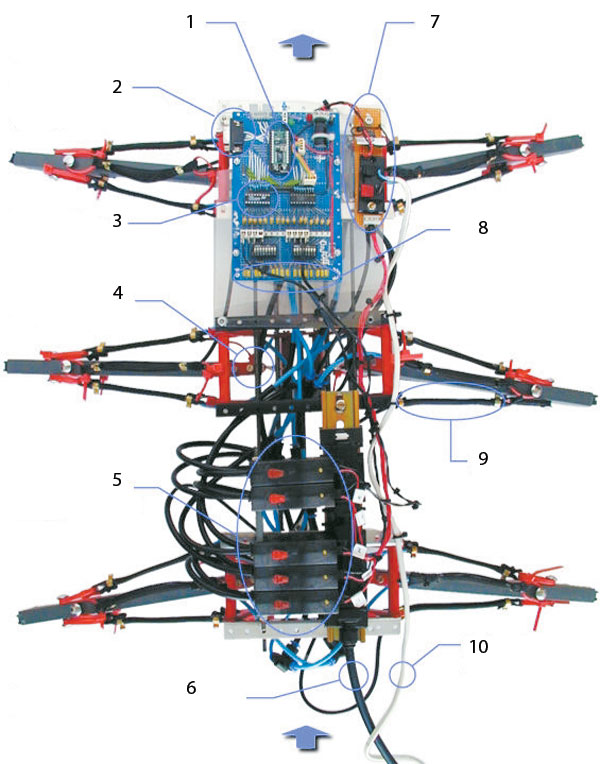
1. Control chip, which determines which step will be taken first |
7. 6-volt regulator for the control and drive chips |
The scorpion robot, built using advanced technology, possesses a complex structure. Even though a great many scientists and engineers worked on this robot, it can only travel towards a pre-established target. |
|
Робот-Омар Суудагы Агымдарды Омар Сыяктуу Аныктайт
Омарлар (он буттуу рактар) толкундуу жана булганыч сууларда, таштуу, кумдуу же балырлуу беттерде да эч кыйналбастан кыймылдай алышат. Мындай оор чөйрөлөрдө толук жабдылган чумкугуч адамдар (водолаздар) да алдыга жылууда кыйналышат. Бүгүнкү күнгө чейин деңиз түбүндө колдонулуу үчүн жасалган эч бир робот мындай жерде ийгиликке жете алган жок.
Northeastern университети (Boston MA) Деңиз илимдери бөлүм башчысы Йозеф Айерс (Joseph Ayers) омарды туураган бир робот жасоо долбоорун жетектөөдө. Айерс долбоордун максатын мындайча түшүндүрүүдө:
Техникалык максатыбыз – максат чөйрөдөгү жандык системасынын натыйжалуулук артыкчылыктарына жетүү.137
Роботтун кен байлыктарды табууда жана табылган кен байлыктарда иштетилиши пландалууда. Айерс бул жумуштар үчүн омардын канчалык ыңгайлуу экенин мындайча айткан:
Роботтун суу астында кен байлыктарды издеп жатканда кыла турган кыймылдарынын бир омардын тамак издеп жаткандагы кыймылдарына окшошушун күтүп жатабыз.138
Омарлардын ылдам аккан сууда тоголонуп тайышына тоскоол боло турган бир түзүлүшү бар. Жандык эң оор шарттарда да каалаган багытында кыймылдай алат жана түз болбогон жерлерде алдыга жыла алат. Ошол сыяктуу робот да токтоо же ордунда жылбай туруу үчүн куйругун жана манжаларын колдонот.
Роботтогу микро электромеханикалык кабылдагычтар (MEMS) омардын дүйнөнү кабылдашын тууроодо. Робот кыймылдарын суу ичиндеги агымдарга жана толкундарга ылайык жөнгө сала ала турган түзүлүшкө ээ. Бул үчүн омар-роботко өзгөчө суу агымы кабылдагычтары жана антенналар тагылган. Чыныгы бир омар агымдын багытын түктүү органдары аркылуу аныктайт. Робот-омарда болсо бул ишти электромеханикалык кабылдагычтардын кылышы пландалган.139
 |
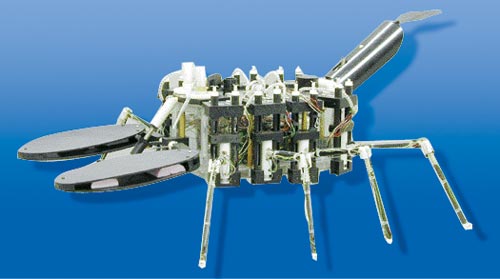 |
Lobster |
Robo-lobster |
Омардын Жыт Алуу Үчүн Колдонгон Ыкмасы
 |
Сууда жашаган омар жана рак сыяктуу жандыктар ылайыктуу бир жуп же азык табуу же болбосо аңчылардан качуу үчүн жыт алуу сезимдерин колдонушат. Калифорния Беркли жана Стэнфорд университеттеринен изилдөөчүлөр катышкан бир изилдөө омарлардын айланадагы дүйнөнү кандайча жыттаарын аныктаган.
Омарлар абдан сезгич бир жыт алуу сезимине ээ. Бул сезим жыт алуу сенсорлорун иштеп чыгууга аракет кылган робот инженерлерге жол көрсөтүшү мүмкүн. Калифорния Беркли университетинде биология профессору жана College of Letters & Science аттуу журналдын башкы автору Мими А. Р. Кель (Mimi A. R. Koehl) бул жөнүндө мындай дейт:
Эгер чумкугучтарды жөнөткүңүз келбеген уулуу аймактарга жөнөтө турган адамсыз унаалар же роботторду жасагыңыз келип жатса жана алардын жытка карап орун аныкташын каалап жатсаңыз, анда алар үчүн мурун же жыт кабылдоочу антенналар долбоорлошуңуз керек.140
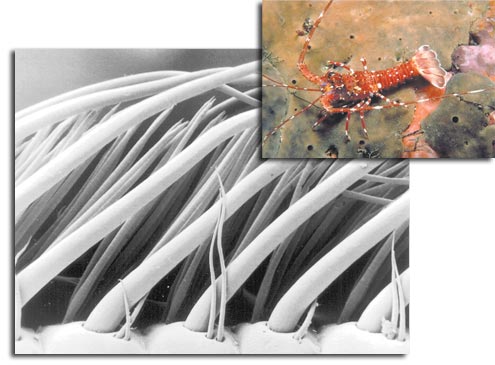 |
Hairs on the lobster antennule |
Омарлар жана башка деңиз кабыктуулары антенналарын жыт булагына акырын уруу менен жыт алышат. Мындагы максат антенналардын учунда жайгашкан жана химиялык жолдор менен кабылдай алган түктөрдү жыт молекулаларына тийгизүү. Кариб деңизинде жашаган Panulirus argus аттуу омардын антенналарынын бою 30 смге жетет. Учтарында жарыгы бар антеннанын сырткы тарабы түктүү бир щеткага окшошот. Бул жер жыттарга карата абдан сезимтал.
Калифорния Беркли университетинен Мими А. Р. Кель башчылыгындагы бир изилдөөчүлөр тобу антенналарын уруучу механикалык бир омар жасашкан. Rasta Lobsta деп аталган робот менен жасалган эксперименттер аркылуу омарлардын жыт алуу үчүн колдонгон ыкмасынын майда-бараттары изилденген.
Омар антеннасын жыттагысы келген нерсенин үстүнө бат уруп, бирок кайра тартып жатканда жайыраак кыймылдоодо. Натыйжада жыт аралашкан суу түктөрдүн арасында кыймылдабай көбүрөөк турууда.
Омардын жытты кабылдай алышы үчүн идеалдуу бир антенна уруу жана кайра тартуу ылдамдыгы бар. Жасалган эксперименттер антенна ар кандай ылдамдыкта кыймылдаганда, суунун сезимтал түктөр арасында акпашын жана жандыктын жыт алуу сезимталдыгынын азайаарын көрсөткөн. Мунун мааниси мындай: омар абдан кичинекей бир жердеги эң кичинекей жыт айырмаларын да түктөрү аркылуу кармай алууда. Бул үчүн болсо антеннасын өзгөчө бир ыкма менен колдонууда.141
Жаңы Механикалык Системалардын Алды: Сөөлжандардын Булчуң Түзүлүшү
 |
Сөөлжандын териси абдан натыйжалуу бир долбоорго ээ. Жандыктын цилиндр формасындагы денесин каптаган териси кайчылаш спиральдар абалында курчалган жипчелерден турат. Дене дубалындагы булчуңдардын жыйрылышы теридеги кыска жана калың жипчелердин узун жана ичке бир формага келип, жандыктын денесиндеги ички басымдын жогорулашына, натыйжада формасынын өзгөрүшүнө себеп болот. Сөөлжандардын кыймылдашын камсыздаган механизмдин негизи да – мына ушул.
Учурда мындай теңдешсиз механикалык система Reading университетинин биомиметика борборунда жаңы долбоорлорго илхам берүүдө: аталган долбоорлордун бирөөсүндө көп санда цилиндрдик түзүлүш сөөлжандагы сыяктуу жайгаштырылган. Ал ортодо цилиндрлердин ичинин суу соро алуучу полимер бир гель менен толтурулушу пландалган. Сууну колдонуу менен гельдин шишиши жана жыйрылышы камсыздалат. Натыйжада химиялык энергия бир гана керектүү жерде механикалык энергияга айланат жана пайда болгон басым толугу менен коопсуз абалда спираль формасындагы бир идиште камалат. Гельдин шишиши жана жыйрылышынын ушундайча башкарылышы аркылуу пайда болгон системанын жасалма бир булчуң катары натыйжалуу иштеши күтүлүүдө.142
Адамдар өрнөк алган ар бир жандык, алар ээ болгон ар бир система – ыйман келтирген адамдар үчүн Аллахтын бир аяттары (далилдери). Бул чындык Жасия Сүрөсүндө мындайча билдирилген:
Силердин жаратылууңарда жана көбөйтүп-жайган жандууларда так илим менен ишенген бир коом үчүн аяттар бар. (Жасия Сүрөсү, 4)
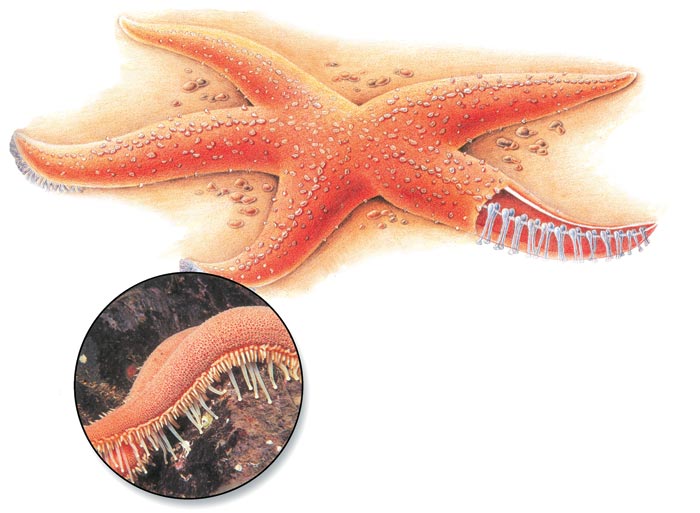 |
Changing shape, expanding and contracting by the use of pressure, is frequently used in nature. The worm, octopus, starfish and anemone are some of the best examples; yet shape-changing is found much less frequently in technological equipment. In those few examples that do exist, hydraulic pressure is employed. In lifts, for example, hydraulic liquid is pumped into a thin cylinder to raise heavy objects. To lower the lift, the cylinder is emptied again. Starfish also use hydraulic pressure to move. Along the undersides of its arms, the echinoderm possesses tube-like feet, attached to an internal, fluid-filled tubing system. When its muscles contract the tubes, the resulting hydraulic pressure sends fluid to the feet. Using its muscles, the starfish uses hydraulic power to set up a wave motion in its feet, moving forward and back and allowing the starfish to progress in one direction. |
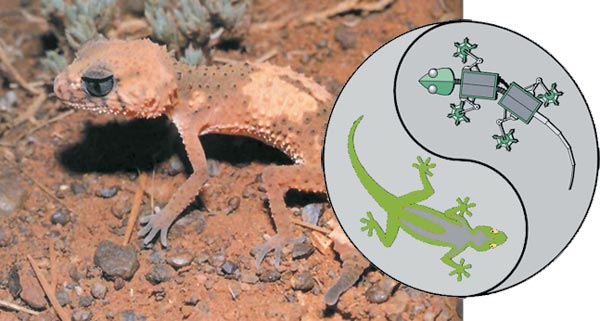
Геко Кескелдиригинин Буттары Технологияга Жол Көрсөтүүдө
 |
Геко аттуу кескелдириктер дубалдарга ылдам тырмышып чыгып, шыпка жабыша алышат жана ал жерде эч кыйналбай баса алышат. Көп жылдардан бери уланган изилдөөлөр натыйжасында жандыктын мындай жөндөмүнүн кайсы жогорку долбоорго таянаары аныкталган. Бүгүнкү күнгө чейин ойдон чыгарылган тасма каарманы «жөргөмүш адам» сыяктуу тик беттерге ыкчам жабышып чыгууну камсыздай турган бир жөндөмдүүлүктүн кантип мүмкүн болоору белгисиз эле. Бирок геконун жалгыз бир кадамы өзгөчө робот долбоорчулары үчүн абдан чоң өнүгүүлөргө жол ачты. Булардын кээ бирлери төмөнкүлөр:
- Калифорниялык изилдөөчүлөр кескелдириктин жабышчаак манжалары кургак жана өзүн-өзү тазалоочу жаңы бир синтетикалык клейди иштеп чыгууда жардамчы болот дешүүдө.143
- Геколор буттары менен сүрүлүү күчүнөн 600 эсе чоң бир жабышчаак күч өндүрүшөт. Мындай жабышуу ыкмасына ээ, гекого окшош буттар менен жасалчу роботтор дубалдарда басып, күйүп жаткан бир имаратта жардамсыз калган адамдарды куткарууда колдонулушу мүмкүн. Кичинекей инструменттер колдонулган медициналык иштерде жана компьютер инженериясында болсо кургак бир клей катары чоң пайдалар бериши мүмкүн.144
- Буттары менен бир бетке тийишкенде, автоматтык түрдө реакция берүүчү жаалар сыяктуу кыймылдашат. Бул болсо мээси болбогон роботтор үчүн абдан жакшы бир ыкма. Геконун буттары кайра кайра колдонулганда бузулбайт; өзүн-өзү тазалайт жана вакуум чөйрөлөрүндө жана суу астында да иштейт.145
- Нано-операциялар учурунда тайгак дене органдарын чогуу кармоого жарашы мүмкүн.146
- Унаа дөңгөлөктөрүнүн жолдо азыраак тайышы камсыздалышы мүмкүн.147
- Кайыктарды, көпүрөлөрдү, кеме токтоочу жердеги жарылууларды оңдоодо, спутниктерди үзгүлтүксүз кароону камсыздоодо колдонууга болот.148
- Геко менен жасала турган роботтор аркылуу жерлерди, айнектерди, шыптарды, тик полдорду тазалоого мүмкүн. Тик беттерге тырмышуудан тышкары алдынан чыкчу тоскоолдуктардан да таасирленбейт.149
 |
Бележки
130 http://mitpress. mit. edu/catalog/item/default. asp?sid=059CE164-6183-4410-8320-D5828734B95A&ttype=2&tid=8812
131 Bu konuda ayrıntılı bilgi için bakınız: Harun Yahya, Düşünen insanlar için, Vural Yayıncılık, Aralık 2000, 4. baskı ss. 71-74.
132 http://www. howstuffworks. com/snakebot. htm
133 http://www. newscientist. com/news/news. jsp?id=ns9999637
134 http://ais. gmd. de/BAR/SCORPION/biology. htm
135 http://ais. gmd. de/BAR/SCORPION/
136 http://www. newscientist. com/news/news. jsp?id=ns9999637
137 http://www. spie. org/web/oer/september/sep00/cover1. html
138 http://www. spie. org/web/oer/september/sep00/cover1. html
139 http://www. spie. org/web/oer/september/sep00/cover1. html
140 http://www.berkeley.edu/news/media/releases/2001/11/30_lobst.html
141 http://www.berkeley.edu/news/media/releases/2001/11/30_lobst.html
142 http://www. rdg. ac. uk/Biomim/projects. htm
143 http://news. bbc. co. uk/low/english/sci/tech/newsid_781000/781611. stm; BBC News Online, 7 June, 2000
144 http://www. worldwealth. net/samplemag/ArticleGeckoPrint. html; World Wealth International, February 2001, Vol 1, Issue No.1
145 http://www. discover. com/sept_00/featGecko. html; Fenella Saunders, Discover, September 2000, vol.21, No.9
146 http://www. discover. com/sept_00/featGecko. html; Fenella Saunders, Discover, September 2000, vol.21, No.9
147 http://www. discover. com/sept_00/featgecko. html; Fenella Saunders, Discover, September 2000, vol.21, No.9
148 http://www. discover. com/sept_00/featgecko. html; Fenella Saunders, Discover, September 2000, vol.21, No.9
149 http://www. discover. com/sept_00/featgecko. html; Fenella Saunders, Discover, September 2000, vol.21, No.9
- Киришүү
- 1-Бөлүм: Акылдуу Материалдар
- 2-Бөлүм: Өсүмдүктөрдөгү Долбоорлор Жана Биомиметика
- 3-Бөлүм: Табияттагы Ылдамдык Коробкалары (Кутулары) Жана Реактивдүү Учак Моторлору
- 4-Бөлүм: Толкундарды Жана Титирешүүлөрдү (Вибрацияларды) Колдонуу
- 5-Бөлүм: Андуулар Жана Учуу Технологиясы
- 6-Бөлүм: Жаныбарлардан Үйрөнгөндөрүбүз
- 7-Бөлүм: Технологиядан Жогору Органдар
- 8-Бөлүм: Биомиметика Жана Архитектура
- 9-Бөлүм: Жандууларды Туураган Роботтор
- 10-Бөлүм: Табияттагы Технология
- Жыйынтык