Liksom områden som är förorenade av radioaktivitet, är rymden och havsdjupen farliga platser för människor har förbättringar inom elektronik och datorteknik låtit oss bygga robotar som kan arbeta på sådana platser. Så småningom delade sig denna disciplin från elektronik och mekanik för att bilda en vetenskapsgren i sin egen rätt, nämligen robotar. De som numera arbetar med robotteknik har ett nytt koncept på sin agenda: biomimetriska robotar.
Forskare och ingenjörer engagerade i robotik tror nu att det inte är särskilt praktiskt att utforma robotar för en viss uppgift. De anser att det är enklare att vettigare att bygga robotar som imiterar funktioner och förmågor hos levande ting, inhemska till de miljöer där dessa robotar ska användas. Exempelvis kommer de, för utforskningen av öknen, att skapa en biomimetrisk robot som liknar en skorpion eller en myra. En bok som heter Neurotechnology for Biomimetic Robots innehåller följande information om detta ämne:
Biomimetiska robotar skiljer sig från traditionella robotar genom att de är smidiga, relativt billiga och kan hantera verkliga miljöer. Konstruktionen av dessa robotar kräver en grundlig förståelse i de biologiska system som de bygger på både på biomekaniska och fysiologiska nivåer.
... Det slutliga målet är att utveckla en verklig autonom robot med en möjlighet att navigera och interagera med sin omgivning enbart på grundval av sensorisk återkoppling utan återkoppling till en mänsklig operatör.103
 |  |  |
Det som ledde forskarna till att imitera levande ting var deras felfria fysiska konstruktioner. Ingenjör Hans J. Schneebeli, formgivare av robotanordningen som kallas Karlsruhe hand, uppgav att ju mer han arbetade med robotiska händer desto mer beundrade han den mänskliga handen. Han tillade att de fortfarande behöver en hel del tid för att kopiera även en del av de många uppgifter som en mänsklig hand kan utföra. 104
Ibland måste forskare från så olika discipliner såsom datateknik, mekanik, elektronik, matematik, fysik, kemi och biologi gå samman för att replikera enbart en del av en levande organism. Men det evolutionistiska tänkandet hävdar fortfarande att de utomordentligt komplexa strukturerna hos levande ting kunde ha uppkommit oplanerade och på egen hand.
För de som arbetar med robotik är ett av de problem som de oftast möter den att upprätthålla balansen. Även robotar utrustade med den allra senaste tekniken kan förlora balansen när de förflyttar sig. Ett tre årigt barn kan klara av att återfå balansen utan svårigheter men robotar som saknar denna förmåga är av nödvändighet stationära och till väldigt liten nytta. Av just det skälet kan i själva verket en robot som NASA förberedde för arbeten på planeten Mars inte användas alls. Efter det övergav robot experter försöken att bygga en balans fastställande mekanismen och istället såg till en organism som aldrig förlorar balansen: ormen.
Till skillnad från andra ryggradsdjur saknar ormar en hård ryggrad och lemmar och har skapats på ett sådant sätt för att klara av sprickor och springor. De kan expandera och dra ihop sin kroppsdiameter och kan klamra sig fast vid grenar samt glida över stenar. Ormarnas egenskaper inspirerade till en ny robotisk interplanetär sond som har utvecklats av NASA: s Ames Research Center och som de kallade "snakebot". Denna robot var avsedd att vara i ett konstant tillstånd av balans utan att någonsin fastna i hinder.105
 |  |
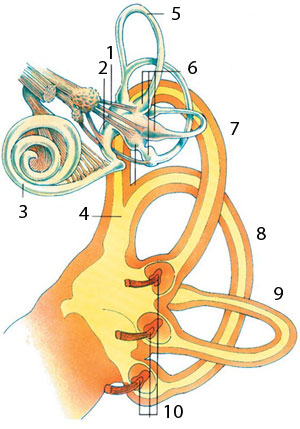 | |
| 1. Ampullary nerves | 6. Ampullae |
Innerörat utför en viktig roll i vårt balanssystem som reglerar hela vår kropp i varje ögonblick och ger oss möjlighet att utföra de känsliga anpassningar som krävs till exempel hos en lindansare.
Denna tyngdpunkt i innerörat kallad labyrinten består av tre små båggångar. De är 6,5 mm (0,26 tum) i diameter och i tvärsnitt mäter det ihåliga utrymmet inuti dem 0,4 mm (0,016 tum). De tre bågarna är lagda i inbördes rätvinkliga plan. En enskild kanal känner rotationer i en av tre ortogonala riktningar. Sålunda kombinerar de tre kanalerna sina resultat och ger möjlighet att känna rotationer i någon riktning i det tredimensionella rummet.
Inuti var och en av dessa tre kanaler finns en viskös vätska. I ena änden av röret är ett gelatinartat lock (Cupula) som sitter på ett utbuktande område (Crista) täckt med sensoriska hörselceller. När vi vrider våra huvuden, går eller gör någon rörelse släpar vätskan i dessa kanaler efter på grund av tröghet. Vätskan trycker mot Cupula och avleder den. Denna avledning mäts av hårcellerna i crista eftersom hårens "vibrationer” ändrar jonbalansen i cellerna som är anslutna till dem, producerande elektriska signaler.
Dessa signaler som produceras i innerörat överförs genom nerverna till lillhjärnan på baksidan av vår hjärna. Dessa överförande nerver från labyrinten till lillhjärnan har visat sig innehålla 20000 nervfibrer.
Lillhjärnan tolkar denna information från labyrinten men för att hålla balansen behöver den även annan information. Därför mottar lillhjärnan konstant information från ögonen och från muskler i hela kroppen och analyserar snabbt all denna information för att beräkna kroppens position i förhållande till tyngdkraften. Sedan, baserat på dessa omedelbara beräkningar, meddelar den musklerna via nerver vilka exakta rörelser som de bör göra för att upprätthålla balansen.
Dessa extraordinära processer sker under mindre än 1/100-dels sekund. Vi kan gå, springa, cykla och idrotta utan att ens vara medvetna om att allt detta pågår. Men om vi, på papper, skulle skriva ned alla beräkningar som pågår i våra kroppar i varje ögonblick skulle formlerna fylla tusentals sidor.
Vår balans fungerar helt perfekt med hjälp av flera mycket komplexa mekanismer som alla är sammankopplade och arbetar tillsammans. Modern vetenskap och teknik måste ännu utreda alla detaljer i dessas operativa principer, för att inte säga imitera dem.
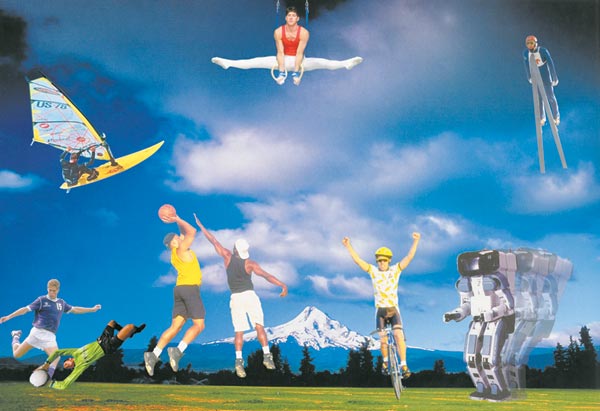 |
| Balance is brought about by a most extraordinarily complicated system, since the human body is in constant motion. That means the brain must constantly recalculate the body's center of gravity, and send instructions to the muscles in light of this. |
Det är naturligtvis omöjligt för en så komplex konstruktion att ha tillkommit av en slump såsom evolutionsteorin vill få oss att tro. Varje design visar att det finns en medveten formgivare. Den överlägsna designen hos vårt balanssystem är ytterligare bevis för Guds existens som skapade detta system så oklanderligt och hans oändliga visdom.
Mot bakgrund av denna insikt är det människans ansvar att tacka Gud som gav honom en sådan struktur.
I USA arbetar Defense Advanced Research Projects Agency (DARPA) för att utveckla en robotisk skorpion. Anledningen till att projektet valde en skorpion som sin modell är att roboten var att verka i öknen. Skorpioner har kunnat överleva hårda öknen villkor ända sedan de skapades. Men en annan anledning till att DARPA valde en skorpion var den att den utöver sin förmåga att kunna röra sig över tuff terräng har mycket enklare reflexer än däggdjur och dessa kan imiteras.106
Innan de utvecklade sin robot tillbringade forskarna mycket tid med att observera förflyttningar hos levande skorpioner med höghastighetskameror och analyserade videodata.107
DARPAs mål är att deras 50 cm (20 tum) robot skorpion ska nå mål 40 km (25 miles) bort i öknen och sedan återvända helt på egen hand utan att få någon vägledning. 108
 |  |
Designad av Frank Kirchner och Alan Rudolph vid Northeastern University i Boston har roboten ingen möjlighet att "tänka igenom" komplexa problem. Vid möten med en svårighet förlitar den sig enbart på sina reflexer. Detta gör det möjligt att övervinna alla hinder som kan hämma dess framfart som exempelvis en sten. På framsidan har roboten två ultraljudssensorer. Skulle det uppstå ett hinder som är mer än halva dess höjd kommer den att försöka gå runt den. Om detektorn till vänster identifierar ett hinder kommer den att vända sig till höger. Roboten kan bli ombedd att gå till en specifik region och med en kamera i svansen skicka tillbaka bilder av platsen till basen.
Den amerikanska armén var mycket imponerad av de försök som hölls i Arizona. Förhoppningen är att robotens förmåga att hitta sin väg till ett mål kan vara särskilt användbart i röriga slagfält såsom städer.109
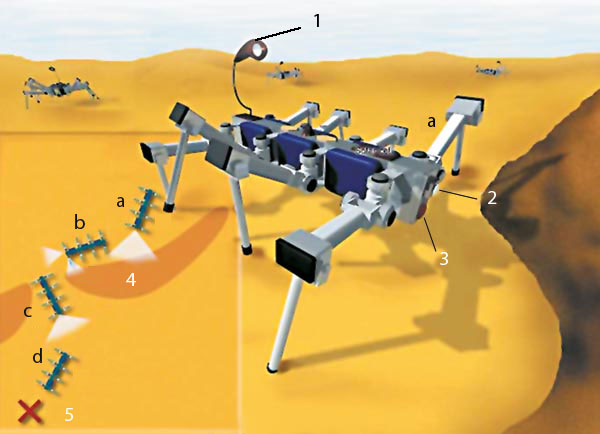 | ||
| 1. Camera and radio connections | 3. Infrared sensors | 5. Target |
| a. When the robot scorpion encounters a rock, first it scans it with ultrasound to decide whether it's too high to climb. | ||
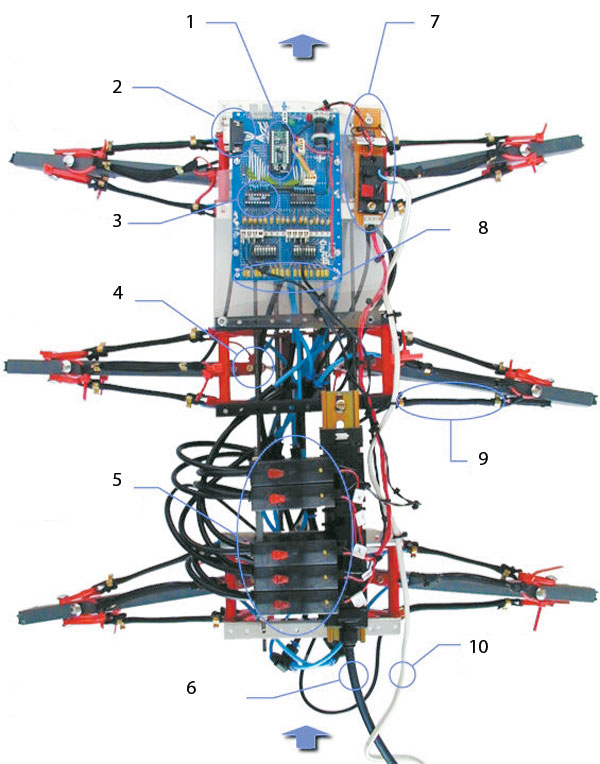 | |
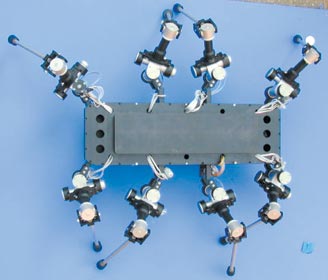
| 1. Control chip, which determines which step will be taken first | 7. 6-volt regulator for the control and drive chips |
| The scorpion robot, built using advanced technology, possesses a complex structure. Even though a great many scientists and engineers worked on this robot, it can only travel towards a pre-established target. | |
Även fullt utrustade mänskliga dykare har svårt att förflytta sig genom turbulenta och grumliga vatten eller krypa längs botten där det kan vara grov sandig eller täckt med alger. Humrar kan detta och utan minsta svårighet. Men än så länge har ingen robot, gjord för att användas på havsbotten, varit framgångsrik i sådana miljöer.
Joseph Ayers chef för Marine Science Center vid Northeastern University i Boston leder ett projekt för att utveckla en robot som imiterar humrar. Såsom han beskriver det är projektets
tekniskt mål att fånga prestandafördelar som djurens system innehåller i dess målmiljö. 110
De förväntar sig att använda denna "hummerrobot" för att hitta och desarmera minor. Ayers säger roboten helst kommer att vara anpassad till denna typ av arbete:
. . . sekvensen av beteendemässiga handlingar som en hummer utför när den söker efter föda är precis vad man skulle ha en robot att utföra för att hitta och neutralisera undervattensminor.111
Humrars form hjälper dem motstå tumlande eller rör sig i snabbrörliga vatten. De kan gå vidare i den riktning de vill under de mest svåra förhållanden även över mycket ojämn terräng. På samma sätt kommer hummerrobot att använda sin svans och klor för stabilitet.
På robotens mikroelektromekaniska givare (MEMS) imiteras humerns sinnesorgan. Utrustad med vattenströmsensorer och antenner kan roboten anpassa sina rörelser till strömmarna i vattnet runt omkring den. En levande hummer använder hårstrån för att bestämma riktningen av strömmarna och på hummerrobot finns elektromekaniska sensorer som är avsedda att göra samma sak.112
 |  |
| Lobster | Robo-lobster |
 Undervattens organismer som krabbor och humrar använder sitt luktsinne för att hitta mat, kompisar eller att fly från rovdjur. En studie utförd av forskare från universiteten i Kalifornien på Berkeley och Stanford avslöjade hur humrar luktar världen omkring sig.
Undervattens organismer som krabbor och humrar använder sitt luktsinne för att hitta mat, kompisar eller att fly från rovdjur. En studie utförd av forskare från universiteten i Kalifornien på Berkeley och Stanford avslöjade hur humrar luktar världen omkring sig.
Humrar har ett mycket känsligt luktsinne vars egenskaper kommer att öppna nya horisonter för robot ingenjörer som försöker att bygga nya luktsensorer. Mimi AR Koehl professor i integrativ biologi vidCollege of Letters and Science vid University of California Berkeleysäger:
Om man vill bygga obemannade fordon eller robotar för att gå till giftiga platser där man inte vill skicka en dykare och om man vill att dessa robotar att hitta något som luktar behöver man designa näsor eller luktsinnesantenner åt dem.113
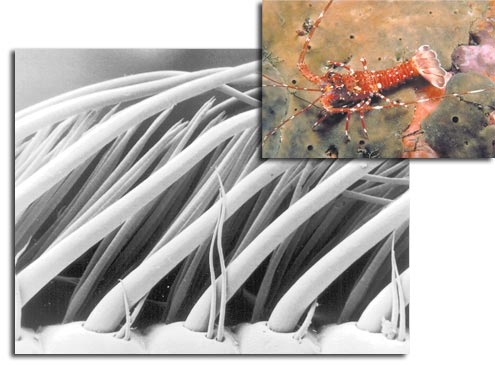 |
| Hairs on the lobster antennule |
Humrar och andra skaldjur luktar genom att snärta ett par antenner mot luktkällan så att de kemisksensoriska hårstråna på ändarna av antenner kommer i kontakt med de vattenburna luktmolekylerna. Hummern Panulirus argus som lever i Karibiska havet har antenner som är 30 cm (3 till 4 inches) långa. På den yttre kanten av en av de delade ändarna av dess antenner finns en hårborst liknande region särskilt känslig för kemikalier.
En grupp forskare, under ledning av professor Koehl, gjorde en mekanisk hummer som knäppte sina antenner på samma sätt. Tester och observationer av denna robot kallad Rasta Lobsta utfördes för att i detalj studera tekniken som humrar använder för att lukta.
När hummern vill lukta på något under antennens nedåt gående rörelse skjuter den antennen genom vattnet snabbt nog för att luktbärande vatten ska tränga in i borsten av sensoriska hårstrån. Men på returslaget sveper den långsammare så att vattnet inte kan förflyttas mellan håren och lukten som penetrerade under den nedåtgående rörelsen och är fången där tills nästkommande nedåtgående sveprörelse.
Antennerna sveper fram och tillbaka i den perfekta hastigheten för att hummern ska kunna lukta. Tester har visat att om antenner svepte ännu långsammare skulle vattnet inte flyta mellan hårstråna minskande dess luktförmåga.. Därför använder den sina antenner på ett sådant sätt att den ska kunna bevara och infånga även små skillnader i luktkoncentrationerna.114
 |
Huden som täcker den cylindriska kroppen hos en mask består av fibrer som är lindade i en korsad spiralform runt och längs kroppen i en imponerande konstruktion. Sammandragning av muskler i kroppsväggen leder till en ökning av det inre trycket och masken kan ändra form allteftersom fibrerna i huden gör det möjligt att gå från kort och tjock till lång och smal. Detta är grunden för maskens rörelseförmåga.
Detta makalöst mekaniska system inspirerar för närvarande nya projekt vid Centrum för Biomimik vid universitetet i Reading. I ett experiment anordnades cylindrar med olika fiber riktningar i linje med maskens anatomi. Planen är att fylla dessa cylindrar med en vattenpolymer gel. Vatten medför att detta gel expanderar. På detta sätt omvandlas kemisk energi till mekanisk energi på precis rätt plats och det resulterande trycket kommer att tryggt bibehållas inuti den spiralformigt lindade påsen. När expansionen och kontraktionen av denna polymergel kontrolleras är förhoppningen den att det resulterande systemet kommer att fungera som en konstgjord muskel.115
Allt levande som människan tar som modell och varje system i det är, för de troende, ett tecken på Gud. Denna sanning uttrycks i en vers:
Och i er egen natur och hos alla de djur som Han låter [föröka sig och] spridas [över jordens yta] finns tecken för dem som äger inre visshet.
(45:4)
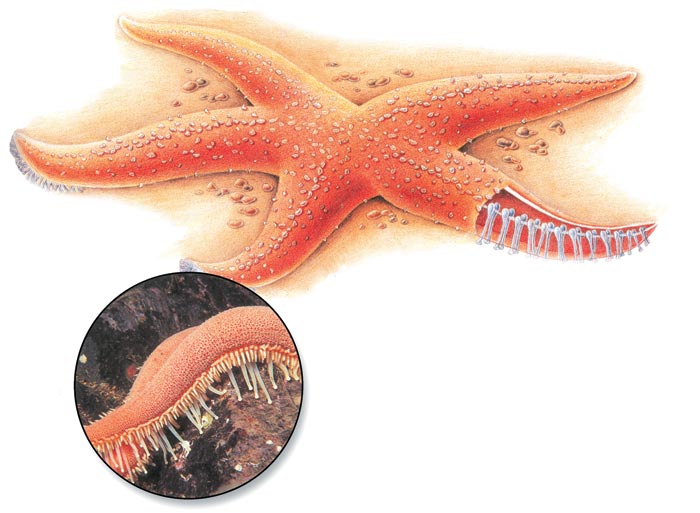 |
| Changing shape, expanding and contracting by the use of pressure, is frequently used in nature. The worm, octopus, starfish and anemone are some of the best examples; yet shape-changing is found much less frequently in technological equipment. In those few examples that do exist, hydraulic pressure is employed. In lifts, for example, hydraulic liquid is pumped into a thin cylinder to raise heavy objects. To lower the lift, the cylinder is emptied again. Starfish also use hydraulic pressure to move. Along the undersides of its arms, the echinoderm possesses tube-like feet, attached to an internal, fluid-filled tubing system. When its muscles contract the tubes, the resulting hydraulic pressure sends fluid to the feet. Using its muscles, the starfish uses hydraulic power to set up a wave motion in its feet, moving forward and back and allowing the starfish to progress in one direction. |
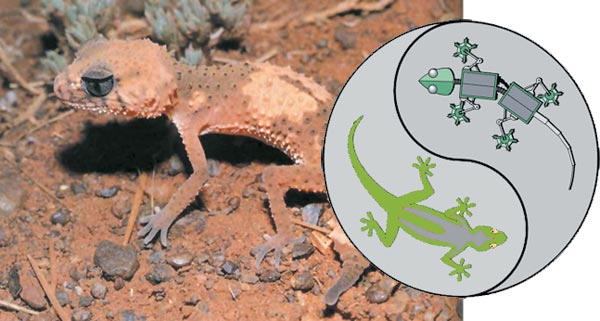
 Dessa små ödlor kan gå mycket snabbt uppför väggar och vandra omkring på innertaket utan problem. Tills nyligen förstod vi inte hur det kunde vara möjligt för ryggradsdjur att klättra uppför väggar som den tecknade och filmade hjälten Spindelmannen. Nu har åratal av forskning slutligen avslöjat hemligheten bakom deras utomordentliga förmåga. Små steg från geckon har lett till enorma upptäckter med enorma konsekvenser särskilt för robot designers. Några kan sammanfattas på följande sätt:
Dessa små ödlor kan gå mycket snabbt uppför väggar och vandra omkring på innertaket utan problem. Tills nyligen förstod vi inte hur det kunde vara möjligt för ryggradsdjur att klättra uppför väggar som den tecknade och filmade hjälten Spindelmannen. Nu har åratal av forskning slutligen avslöjat hemligheten bakom deras utomordentliga förmåga. Små steg från geckon har lett till enorma upptäckter med enorma konsekvenser särskilt för robot designers. Några kan sammanfattas på följande sätt:
- Forskare i Kalifornien tror att ödlans klibbiga tår kan bidra till att utveckla en torr och självrengörande lim. 116
- Geckons fötter genererar en vidhäftningskraft som är 600 gånger större än den för friktion. Geckoliknande robotar skulle kunna klättra uppför väggarna i brinnande byggnader att rädda de som finns i byggnaden. Torrt lim kan vara till stor nytta i mindre enheter t.ex. i medicinska applikationer och dator arkitektur.117
- Geckons ben fungerar som fjädrar och svarar automatiskt när de vidrör en yta. Detta är ett särskilt lämpligt särdrag för robotar som inte har någon hjärna. Geckons fötter förlorar aldrig sin effektivitet oavsett hur mycket de används, de är självrengörande och de också arbeta i ett vakuum eller i vatten.118
- Ett torrt lim kan hjälpa till att hålla snygga kroppsdelar på plats under nanosurgery.119
- Ett sådant lim skulle kunna hålla fast bildäck på vägar.120
- Geckoliknande robotar kan användas för att reparera sprickor i fartyg, på broar och bryggor och i regelbundet underhåll av satellit.121
Robotar som modelleras efter geckoödlors fötter kan användas för att tvätta fönster och rengöra golv och tak. De kommer inte bara att kunna klättra uppför plana vertikala ytor utan även övervinna alla hinder som de möter i sin väg.122
 |
103 Joseph Ayers, Joel L. Davis and Alan Rudolph, "Neurotechnology for Biomimetic Robots;"http://mitpress.mit.edu/catalog/item/default.asp?sid=059CE164-6183-4410-8320-D5828734B95A&ttype=2&tid=8812
104 For further information see Harun Yahya's For Men of Understanding, Ta Ha Publishers, April 2003.
105 Kevin Bonsor, "How Snakebots will Work," Howstuffworks; http://www.howstuffworks.com/snakebot.htm
106 Duncan Graham-Rowe, "Walk like a scorpion," NewScientist; 21 April 2001.
107 "Biological Analysis," AIS Approach; http://ais.gmd.de/BAR/SCORPION/biology.htm
108 Ibid.
109 Duncan Graham-Rowe, "Walk like a scorpion," NewScientist; 21 April 2001.
110 Yvonne Carts-Powell, "Robots mimic living creatures," OE Reports; http://www.spie.org/web/oer/september/sep00/cover1.html
111 Ibid.
112 Ibid.
113 Robert Sanders, "Lobster sniffing:how lobsters' hairy noses capture smells from the sea," UC Berkeley Campus News, November 30, 2001; http://www.berkeley.edu/news/media/releases/2001/11/30_lobst.html
114 Ibid.
115 Projects at the Centre for Biomimetics;http://www.rdg.ac.uk/Biomim/projects.htm
116 http://news. bbc. co. uk/low/english/sci/tech/newsid_781000/781611. stm; BBC News Online, 7 June, 2000
117 World Wealth International, vol. 1,no. 1, February 2001; http://www.worldwealth.net/samplemag/ArticleGeckoPrint.html
118 Fenella Saunders, "Robo-Geckos,"Discover, September 2000, vol. 21, no. 9
119 Ibid.
120 Ibid.
121 Ibid.
122 Ibid.