Bölüm 9: Canlıları Taklit Eden Robotlar
Bölüm 9: Canlıları Taklit Eden Robotlar
 |
Derin deniz dipleri, radyoaktif alanlar veya uzay boşluğu gibi yerler insanların çalışmaları için hep riskli bölgeler olmuştur. Gelişen elektronik ve bilgisayar teknolojisi, bu gibi yerlerde iş yapabilen ve robot olarak isimlendirdiğimiz makineleri yapmaya imkan tanımıştır. Sonuçta robot bilimi de elektronik ve mekanikten ayrılarak "robotik" adlı ayrı bir bilim dalı olmuştur. Bugün robotlarla uğraşanların gündeminde yeni bir kavram vardır: "Biyomimetik robotik"
Robot yapımıyla uğraşan bilim adamları ve mühendisler, artık yaptıkları işe özgü robotlar tasarlamanın pek pratik olmadığını düşünmektedirler. Bu nedenle işin yapılacağı ortamda yaşayan bir canlıyı ya da o canlının bir özelliğini taklit eden robotlar yapmayı daha akılcı ve kolay bulmaktadırlar. Örneğin çölde yapılacak bir keşif için akrebe ya da karıncaya benzeyen, deniz dibindeki bir araştırma içinse balığa ya da ıstakoza benzeyen bir robot yapmak gibi... İşte "biyomimetik robotik"in ilgi alanına böyle robotlar girmektedir. "Neurotechnology for Biomimetic Robots" (Biyomimetik Robotlar İçin Sinir Teknolojisi) isimli kitapta konuyla ilgili şu bilgilere yer verilmiştir:
Biyomimetik robotlar hızlı, daha ucuz ve gerçek dünya koşulları ile baş edebildikleri için geleneksel robotlardan farklıdır. Bu robotların mühendisliği, dayandıkları biyolojik sistemlerin biyomekanik ve fizyolojik seviyelerde anlaşılmasından kaynaklanır.
… Nihai hedef, insan operatörlere ihtiyaç duymadan, sadece duyumsal etkileşime dayanarak çevresiyle ilişkiye girebilen ve yönünü bulabilen bağımsız bir robot geliştirebilmektir.130
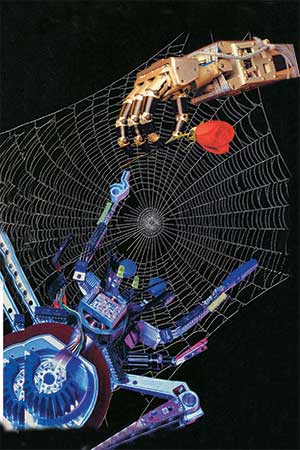
Bilim adamlarını doğadaki canlıları taklit etmeye iten şey, kusursuz vücut tasarımlarıdır. "Karlsruhe eli" olarak bilinen robot elini yapan Hans J. Schneebeli bu konuda şunları söyler:
Robot eller üzerinde ne kadar çok çalışırsam insanların sahip oldukları ellere de o kadar çok hayran oluyorum. İnsan elinin yaptığı işin bir kısmına bile ulaşabilmemiz için daha çok zamanın geçmesi gerekir.131
Bazen bir canlının tek bir özelliğini bile taklit etmek için bilgisayar, mekanik, elektronik, matematik, fizik, kimya ve biyoloji gibi bilim dallarının önde gelen isimlerinin biraraya gelmesi gerekmektedir. Hal böyle iken evrimci düşünce, bugün hala son derece karmaşık bir düzene sahip canlıların bir planlama olmaksızın kendi kendine olaşabileceğini iddia edebilmektedir.
 |  |  |
Robotik Bilimi Denge Sorununu Yenmek İçin Yılanları Taklit Ediyor
Robot bilimi ile uğraşanların en sık karşılaştıkları sorunlardan biri de dengedir. En son teknoloji ürünü donanıma sahip olarak yapılan robotlar bile yürürken dengelerini kaybedebilmektedir. 3 yaşındaki bir çocuğun çok rahatlıkla yapabildiği "dengeyi yeniden kurma" özelliğinden yoksun olan robotlar bu durumda işlevsiz kalmaktadır. Nitekim NASA'nın Mars görevi için hazırladığı bir robot, bu sorun yüzünden hiç kullanılamamıştır. Robotik uzmanları bunun üzerine, denge sağlayıcı bir düzenek kurmak yerine dengesi hiç bozulmayan bir canlıyı, yılanları taklit ederek soruna çözüm bulmaya çalışmışlardır.
Yılanların vücutları diğer hayvanların yapamayacağı şekilde, deliklere ve çatlaklara girebilecek şekilde yaratılmıştır. Omurgalılar gibi sert iskeletleri ve uzuvları yoktur. Gövdelerinin çapını büyütüp küçültebilirler. Dallara sarılabilir ve kayaların üstünden geçebilirler. Yılanların bu özellikleri NASA Araştırma Merkezi tarafından geliştirilen ve "snakebot" adı verilen bir insansız uzay aracına ilham kaynağı olmuştur. Tasarlanan bu yılan robotta, robotun hiçbir engele takılmadan devamlı denge halinde ilerlemesi hedeflenmiştir.132
 |  |
İç Kulaktaki Denge Merkezi Robotik Uzmanlarını Hayrete Düşürüyor
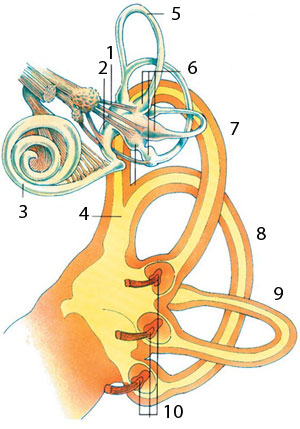 |
| 1. Ampüler sinirler 6. Ampüller |
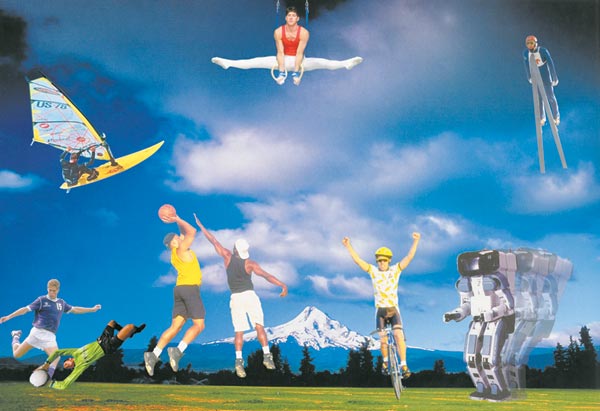
Tüm bedenimizi her saniye sürekli olarak kontrol eden ve ip üstünde yürüyen bir cambazın ihtiyaç duyduğu hassaslıkta ayarlar yapabilen denge sistemimizin önemli bir parçası iç kulakta yer alır.
İç kulaktaki bu denge merkezine "labirent" adı verilir. Labirent, her biri yarım daire şeklindeki üç küçük kemikten oluşur. Bu kemiklerin içleri bir tüp gibi boştur. Yarımdairelerin çapları 6,5 milimetre, içlerindeki boşluğun, yani kesitlerinin çapı ise 0,4 milimetre boyutundadır. Her üç yarım daire de çok özel açılarla birbirlerine bağlanırlar. Bu açılar incelendiğinde, her yarımdairenin üç boyutlu geometrinin temeli olan x, y ve z koordinatlarına karşılık geldiği ortaya çıkmıştır.
Labirentte bulunan bu üç yarımdairenin her birinin içinde, özel bir sıvı yer alır. Bu sıvının içinde gezindiği yüzeyde de tüycüklü hücreler vardır. Biz başımızı sağa sola çevirdiğimizde, yürüdüğümüzde ya da herhangi bir hareket yaptığımızda, bu yarımdairelerin içindeki sıvı hareket eder ve tüycükleri titreştirir. Tüycüklerdeki bu titreşim, aynı salyangozda olduğu gibi tüycüklerin bağlı olduğu hücrelerin iyon dengesini değiştirir ve elektrik sinyali üretir.
İç kulaktaki labirentte üretilen bu elektrik sinyalleri, labirentten çıkan sinirler aracılığıyla beynimizin arka tarafındaki "beyincik" adlı organa iletilir. Labirentten beyinciğe mesaj taşıyan sinirler incelendiğinde, bunların içinde 20 bin ayrı küçük sinir lifi olduğu saptanmıştır.
Beyincik, iç kulaktaki labirentten gelen bu bilgileri her an yorumlar. Ancak dengeyi sağlamak için başka bilgilere de ihtiyaç vardır. Bu nedenle beyincik, gözlerden ve vücudun dört bir yanındaki kaslardan da devamlı olarak bilgi alır. Tüm bu bilgileri müthiş bir hızla analiz eder ve vücudun yerçekimine göre konumunu hesaplar. Bundan sonra ise, bu hesaplamaya dayanarak, kasların nasıl bir hareket yapmaları gerektiğini belirler. Ortaya çıkan sonuç, kaslara yine sinirler aracılığıyla emir olarak bildirilir.
Bu olağanüstü işlemler, saniyenin yüzde biri kadar bile sürmeyen bir zaman dilimi içinde gerçekleşir. Biz de, içimizde gerçekleşen bu mucizenin hiç farkında olmadan rahatlıkla yürür, koşar, en zor sporları yaparız. Oysa bu işlerin tek bir anı için vücudumuzda gerçekleştirilen hesaplamaları kağıda döksek, binlerce sayfa formül yazmamız gerekecektir.
Denge sistemi, içiçe geçmiş birçok kompleks mekanizmanın uyum içinde çalışmasıyla işlev gören kusursuz bir sistemdir. Modern bilim ve teknoloji ise, bu sistemi taklit etmek bir yana, çalışma prensiplerini dahi ayrıntılarıyla çözmeyi başaramamıştır.
 |
| Denge, insan bedenindeki en karmaşık sistemler tarafından sağlanan olağanüstü bir kavramdır. İnsanın dengesi, bir masanın ya da sandalyenin dengede durmasına benzemez. Çünkü insan vücudu sürekli bir hareket halindedir. Bu yüzden vücudun ağırlık merkezi sürekli olarak yeniden hesaplanır ve kaslara bu hesaba uygun emirler verilir. |
Elbette böylesine kompleks bir sistemin evrim teorisinin iddia ettiği gibi rastlantılarla ortaya çıkması mümkün değildir. Bu sistem, Yüce Allah'ın varlığının ve sonsuz kudretinin delillerinden biridir.
Bu gerçeği farkına varan bir insanın sorumluluğu ise, kendisine böyle bir organı vermiş olan Allah'a şükredici olmaktır.
Çölün Zorlu Şartlarına Karşı Koyabilen Robot Akrep
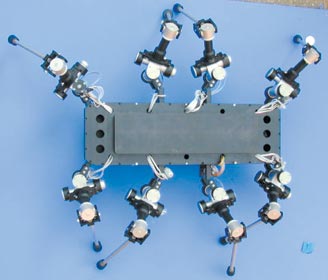
ABD'de faaliyet gösteren DARPA adlı kuruluşun üzerinde çalıştığı projelerden biri de robot akreptir. Projede akrep modelinin seçilmesinin nedeni, robotun çölde görev yapacak olmasıdır. Akrep, yaratılışı itibariyle son derece zorlu şartlara sahip çöllerde bile yaşayabilir. Akrebin seçilmesinin bir diğer nedeni de toprakta kolaylıkla ilerleyebilmesine rağmen reflekslerinin memelilerinkinden daha basit ve taklit edilebilir olmasıdır.133
Araştırmacılar robotu geliştirmeden önce gerçek akrepleri gözlemlemek için uzun zaman harcamışlardır. Akrebin tüm eklemleri işaretlenmiş ve yürüyüşü iki kamera ile kayda alınmıştır.134
Daha sonra bu akrebin yürüş esnasında bacakları arasındaki organizasyon ve koordinasyon çıkarılarak model akrebe uyarlanmıştır.
Akrep projesinde robotun görevi sadece çölde 40 kilometre ötede bulunan bir hedefe girmek ve geri dönmektir. Ancak robotun bu görevi hiçbir yönlendirme almadan kendi kendine yapması hedeflenmiştir.135
 |  |  |
Boston North Eastern Üniversitesi'nden Frank Kirchner ve Alan Rudolph tarafından tasarlanan 50 santimetrelik akrebin karmaşık sorunları çözme yeteneği yoktur. Robot akrep bir sorunla karşılaştığında sadece refleksleriyle hareket etmektedir. Bu, onu durduracak herhangi bir şeyin mesela bir kayaya takılmanın üstesinden gelmesine olanak sağlamaktadır. Robotun önünde iki tane ultrasonik algılayıcı vardır. Eğer boyunun yarısından yüksek bir engelle karşılaşırsa etrafını dolaşmaya çalışacaktır. Eğer sol taraftaki dedektör bir engel teşhis ederse otomatik olarak sağa yönelecektir. Bu robottan belirli bir bölgeye gidip, kuyruğundaki kamera ile üsse resim göndermesi de istenebilmektedir.
ABD ordusu akrebin Arizona'daki denemelerinden çok etkilenmiştir. Robotun yolunu bulma yeteneğinin özellikle şehirler gibi, engellerle dolu olan savaş alanlarında faydalı olması umulmaktadır.136
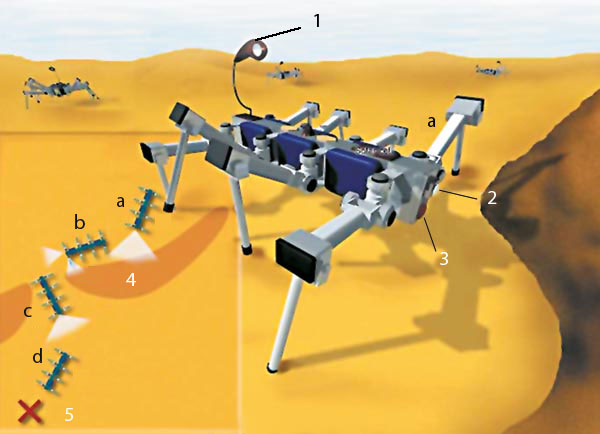 | ||
| 1. Kamera ve Radyo Bağlantısı | 3. Kızıl ötesi algılayıcılar | 5. Hedef |
| a. Robot akrep bir kaya ile karşılaşınca ultrasonla kayayı araştırdıktan sonra akrep, üzerinden tırmanmak için çok yüksek olduğuna karar verir. | ||
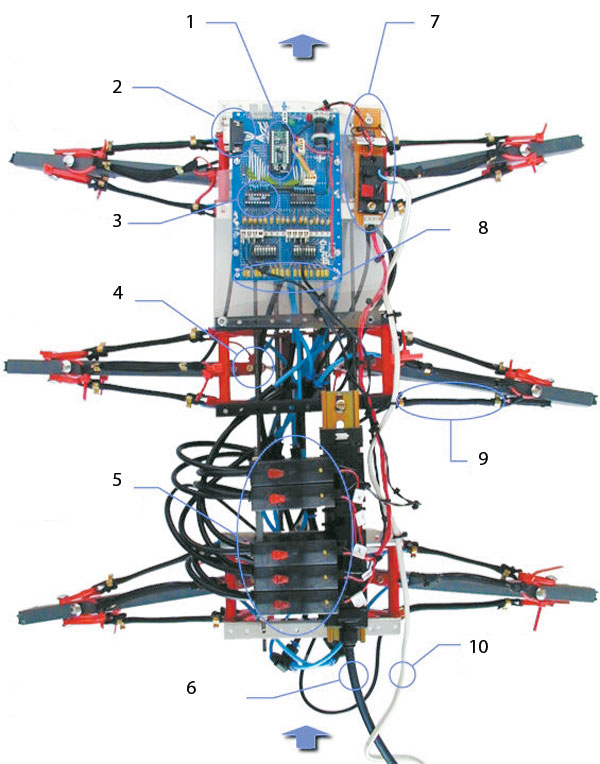 | |
| 1. Hangi adımın önce atılacağını belirleyen kontrol çipi | 7. Kontrol ve sürücü çipler 6 volt voltaj regülatörü |
| Yüksek teknoloji kullan›larak yap›lan robot akrep karmafl›k bir yap›ya sahiptir. Buna karfl›n, tasar›m›nda birçok mühendis ve bilim adam›n›n çal›flt›¤› robot sadece kendisine önceden verilen hedefe gidebilmektedir. | |
Robo-lobster, Sudaki Akıntıları Istakozun Belirlediği Gibi Belirleyecek
Istakozlar dalgalı ve bulanık sularda, taşlı, kumlu veya yosunlu yüzeylerde bile rahatlıkla hareket edebilirler. Böyle zorlu ortamlarda tam donanımlı dalgıçlar bile ilerlemekte zorlanırlar. Şimdiye kadar deniz dibinde kullanılmak üzere yapılan hiçbir robot böyle bir yerde başarılı olamamıştır.
Northeastern Üniversitesi (Boston MA) Deniz Bilimleri Bölüm Yöneticisi Joseph Ayers, ıstakozu taklit eden bir robot geliştirme projesine liderlik yapmaktadır. Ayers projenin amacını şöyle açıklıyor:
Teknik hedefimiz, hedef ortamdaki hayvan sisteminin performans avantajlarını yakalamaktır. 137
Robotun, madenlerin bulunması ve açılan madenlerde çalışması düşünülüyor. Ayers bu işler için yine ıstakozun ne kadar uygun olduğunu ise şöyle dile getiriyor:
Robotun su altı madenlerini ararken yapacaklarının, bir ıstakozun yemek ararken yaptığı davranışlara uymasını bekliyoruz.138
Istakozların hızlı hareket eden suda yuvarlanıp kaymalarını engelleyecek bir yapısı vardır. Hayvan en zor şartlarda bile istediği yönde hareket edebilir ve düzgün olmayan yüzeylerde ilerleyebilir. Aynı şekilde robot da durmak ya da yerinde sabit kalmak için kuyruğunu ve pençelerini kullanacaktır.
Robottaki mikro elektromekanik algılayıcılar (MEMS) ıstakozun dünyayı algılayışını taklit etmektedir. Robot, hareketlerini su içindeki akımlara ve dalgalanmalara göre ayarlayabilecek yapıdadır. Bunun için ıstakoz robota özel su akımı algılayıcıları ve antenler takılmıştır. Gerçek bir ıstakoz, akıntının yönünü tüylü organları ile belirler. Robot ıstakozda ise aynı işi elektromekanik algılayıcıların yapması planlanmıştır.139
 |  |
| Lobster | Robo-lobster |
Istakozun Koku Almak İçin Kullandığı Teknik
 |
Suda yaşayan ıstakoz ve yengeç gibi canlılar, uygun bir eş veya besin bulmak ya da avcılardan kaçmak için koku alma duyularını kullanırlar. California, Berkeley ve Stanford Üniversiteleri'nden araştırmacıların katıldığı bir çalışma, ıstakozların etraflarındaki dünyayı nasıl kokladıklarını ortaya çıkarmıştır.
Istakozlar çok hassas bir koku alma duyusuna sahiptirler. Bu duyu, koku sensörleri geliştirmeye çalışan robot mühendislerinin önünde yeni ufuklar açacak özellikler taşımaktadır. California, Berkeley Üniversitesi'nde Biyoloji Profesörü ve College of Letters & Science adlı derginin başyazarı olan Mimi A. R. Koehl bu konuyla ilgili olarak şunları söylemektedir:
Eğer dalgıçları göndermek istemediğiniz zehirli bölgelere yollayacak insansız taşıtlar ya da robotlar yapmak istiyor ve bunların kokuya göre yer belirlemesini istiyorsanız, bunlar için burun veya koku alan antenler tasarlamalısınız.140
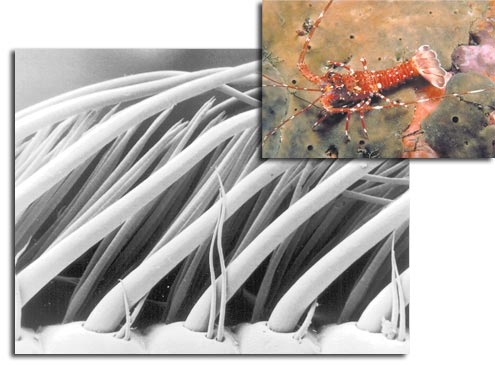 |
| Istakozun antenindeki tüylü doku |
Istakozlar ve diğer deniz kabukluları, antenlerini koku kaynağına hafifçe vurarak koku alırlar. Bundaki amaç, antenlerinin ucunda bulunan ve kimyasal yollardan algılama yapabilen tüyleri koku molekülleriyle temas ettirmektir. Karaib Denizi'nde yaşayan Panulirus argus adlı ıstakozun antenlerinin boyu 30 cm'yi bulur. Uçlarında yarık bulunan antenin dış tarafı tüylü bir fırça görünümündedir. Burası kokulara karşı oldukça duyarlıdır.
California, Berkeley Üniversitesi'ndeki Mimi A. R. Koehl liderliğinde bir grup araştırmacı antenlerini vuran mekanik bir ıstakoz yapmışlardır. Rasta Lobsta adı verilen robot ile yapılan deneme ve gözlemlerle, ıstakozların koku almak için kullandıkları tekniğin detayları araştırılmıştır.
Istakoz antenini, koklamak istediği şeyin üzerine hızla vurmakta fakat geri çekerken daha yavaş davranmaktadır. Böylece koku bulaşmış olan su, tüylerin arasında hareket etmeyerek daha uzun kalmaktadır.
Istakozun kokuyu algılayabilmesi için ideal bir anten vuruş ve geri çekiş hızı vardır. Yapılan deneyler, antenin farklı bir hızda hareket ettirilmesi halinde suyun duyarlı tüyler arasında akmayacağını ve hayvanın koku alma duyarlılığının azalacağını göstermiştir. Bunun anlamı şudur: Istakoz çok küçük bir yerdeki en ufak koku farklılıklarını bile tüyleri vasıtasıyla yakalayabilmektedir. Bunun için de antenini özel bir teknikle kullanmaktadır.141
Yeni Mekanik Sistemlerin Öncüsü: Solucanların Kas Yapısı
 |
Solucan derisi son derece etkileyici bir tasarıma sahiptir. Hayvanın silindir biçimindeki vücudunu kaplayan derisi, çapraz sarmallar biçiminde kuşatılmış liflerden oluşur. Vücut duvarındaki kasların kasılması, derideki kısa ve kalın olan liflerin uzun ve ince bir şekle girerek hayvanın vücudundaki iç basıncın artmasına, böylece biçim değiştirmesine sebep olur. İşte solucanların hareket etmesini sağlayan mekanizmanın temeli de budur.
Şu an bu benzersiz mekanik sistem, Reading Üniversitesi Biyomimetik Merkezi'nde yeni projelere ilham kaynağı olmaktadır: Söz konusu projelerden birinde çok sayıda silindirik yapı solucandaki gibi yerleştirilmiştir. Bu arada silindirlerin içinin su emebilecek polimer bir jelle doldurulması planlanmıştır. Su kullanarak jelin şişmesi ve kasılması sağlanacaktır. Böylece kimyasal enerji yalnızca gereken yerde mekanik enerjiye dönüşecek ve meydana gelen basınç tamamen güvenli bir şekilde sarmal biçimli bir torbada hapsedilecektir. Jeldeki şişme ve kasılmanın bu şekilde kontrol altına alınmasıyla oluşturulan sistemin yapay bir kas olarak etkili biçimde çalışacağına inanılmaktadır.142
İnsanların örnek aldıkları her canlı, onların sahip oldukları her sistem iman eden insanlar için Allah'ın birer ayeti (delili)dir. Bu gerçek Casiye Suresi'nde şöyle bildirilmiştir:
Sizin yaratılışınızda ve türetip-yaydığı canlılarda kesin bilgiyle inanan bir kavim için ayetler vardır. (Casiye Suresi, 4)
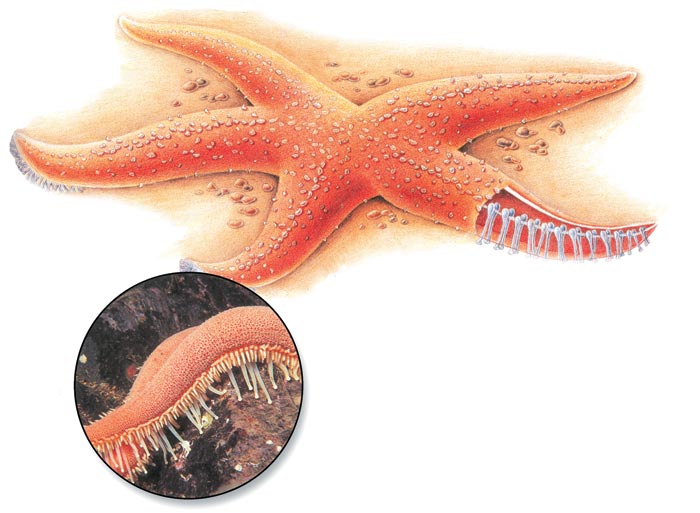 |
| Doğada basınçla hacim büyültüp küçülterek şekil değiştirme sıkça kullanılır. Solucan, ahtapot, deniz yıldızı ve anemonlar bu konuda verilebilecek en iyi örneklerdir. Oysa teknolojik aletlerde şekil değiştirme pek rastlanılır bir şey değildir. Var olan sayılı örnekte bu iş için hidrolik basınç kullanılır. Hidrolik basınç ağır nesneleri, mesela asansörleri kaldırmak için ince boruların içinde uygulanır. Hidrolik adı verilen sıvı, asansörü yukarı itmek için silindire pompalanır. Asansörü aşağı çekmek için de geri boşaltılır. Deniz yıldızları da hareket etmek için hidrolik basıncı kullanırlar. Hayvan, kolları içinde uzunlamasına yer alan tüp biçimli ayaklara sahiptir. Bunlar sıvıyla dolu olan bir iç boru sistemine bağlıdır. Kaslar boruları sıkıştırdığında oluşan hidrolik basınç, sıvıyı ayaklara gönderir. Deniz yıldızı kaslarını kullanarak hidrolik kuvvetin vücudunda bir dalga hareketi oluşturmasını sağlar. İşte bu dalga hareketi sonucu ayaklar bir ileri bir geri uzanarak deniz yıldızının ilerlemesine olanak tanır. |
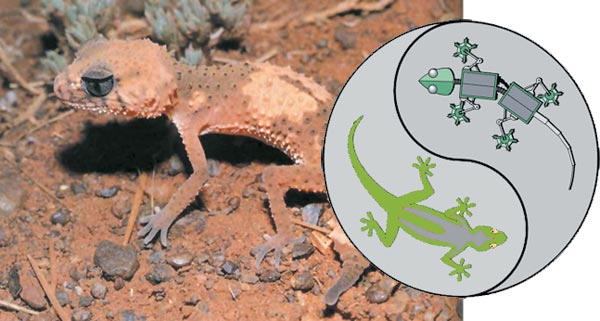
Geko Kertenkelesinin Ayakları Teknolojiye Ufuk Açıyor
 |
Geko adlı kertenkeleler duvarları hızla tırmanarak tavana yapışabilir ve burada rahatlıkla yürüyebilirler. Uzun yıllardır yürütülen çalışmalar sonucunda hayvanın bu becerisinin hangi üstün tasarımdan kaynaklandığı bulunmuştur. Şimdiye kadar hayali film kahramanı "örümcek adam" gibi dikey yüzeylere hızla tırmanmayı sağlayacak bir yeteneğin ne şekilde mümkün olabileceği bilinmiyordu. Ancak gekonun tek bir adımı özellikle robot tasarımcıları için çok büyük gelişmelere yol açmıştır. Bunlardan bazılarını şöyle sıralayabiliriz:
- Kaliforniyalı araştırmacılar kertenkelenin yapışkanlı parmaklarının hem kuru hem de kendi kendini temizleyen yeni bir sentetik yapıştırıcının geliştirilmesine yardımcı olacağını düşünmektedirler.143
- Gekolar ayaklarıyla sürtünme kuvvetinden 600 kat daha büyük bir yapışkan güç üretirler. Bu tarz bir yapışma tekniğine sahip, geko benzeri ayaklarla yapılacak robotlar, duvarlarda yürüyerek yanan bir binadaki mahsur kalmış kişileri kurtarma için kullanılabilir. Daha küçük araçların kullanıldığı tıbbi uygulamalarda ve bilgisayar mühendisliğinde ise kuru bir yapışkan olarak büyük faydalar sağlayabilir.144
- Bacaklarıyla bir yüzeye dokunduklarında otomatik olarak tepki veren yaylar gibi hareket ederler. Bu da beyni olmayan robotlar için oldukça iyi bir metottur. Gekonun ayakları defalarca kullanımda bozulmaz; kendi kendini temizler ve vakumlu ortamlarda ve su altında da çalışır.145
- Nano-ameliyatlar sırasında kaygan vücut parçalarını birarada tutmaya yarayabilir.146
- Araba lastiklerinin yolu daha iyi kavraması sağlanabilir.147
- Teknelerin, köprülerin, iskelelerin çatlaklarının onarılmasında, uydular için düzenli bakımın sağlanmasında kullanılabilir.148
Geko ile yapılacak robotların yerleri, camları, tavanları, dik zeminleri temizlemesi mümkün olabilir. Ayrıca sadece dik yüzeylerin tırmanılması değil, karşılaşılan engellerden de etkilenme olmayacaktır.149
 |
Dipnotlar
130 http://mitpress. mit. edu/catalog/item/default. asp?sid=059CE164-6183-4410-8320-D5828734B95A&ttype=2&tid=8812
131 Bu konuda ayrıntılı bilgi için bakınız: Harun Yahya, Düşünen insanlar için, Vural Yayıncılık, Aralık 2000, 4. baskı ss. 71-74.
132 http://www. howstuffworks. com/snakebot. htm
133 http://www. newscientist. com/news/news. jsp?id=ns9999637
134 http://ais. gmd. de/BAR/SCORPION/biology. htm
135 http://ais. gmd. de/BAR/SCORPION/
136 http://www. newscientist. com/news/news. jsp?id=ns9999637
137 http://www. spie. org/web/oer/september/sep00/cover1. html
138 http://www. spie. org/web/oer/september/sep00/cover1. html
139 http://www. spie. org/web/oer/september/sep00/cover1. html
140 http://www.berkeley.edu/news/media/releases/2001/11/30_lobst.html
141 http://www.berkeley.edu/news/media/releases/2001/11/30_lobst.html
142 http://www. rdg. ac. uk/Biomim/projects. htm
143 http://news. bbc. co. uk/low/english/sci/tech/newsid_781000/781611. stm; BBC News Online, 7 June, 2000
144 http://www. worldwealth. net/samplemag/ArticleGeckoPrint. html; World Wealth International, February 2001, Vol 1, Issue No.1
145 http://www. discover. com/sept_00/featGecko. html; Fenella Saunders, Discover, September 2000, vol.21, No.9
146 http://www. discover. com/sept_00/featGecko. html; Fenella Saunders, Discover, September 2000, vol.21, No.9
147 http://www. discover. com/sept_00/featgecko. html; Fenella Saunders, Discover, September 2000, vol.21, No.9
148 http://www. discover. com/sept_00/featgecko. html; Fenella Saunders, Discover, September 2000, vol.21, No.9
149 http://www. discover. com/sept_00/featgecko. html; Fenella Saunders, Discover, September 2000, vol.21, No.9