CHAPITRE 9
ROBOTS QUI IMITENT LES CREATURES VIVANTES
Tout comme les zones contaminées par la radioactivité et l'espace, les profondeurs des océans sont des zones dangereuses pour les êtres humains. Des améliorations en électronique et informatique nous ont permis de construire des robots qui peuvent travailler dans de tels endroits. Finalement, cette discipline s'est éloignée de l'électronique et de la mécanique pour former une branche scientifique appelée : robotique. De nos jours, toute personne qui travaille en robotique doit utiliser un nouveau concept : le biomimétisme appliqué à la robotique.
Les scientifiques et ingénieurs qui travaillent dans le domaine de la robotique admettent aujourd'hui que la conception d'un robot qui puisse exécuter une tâche précise n'est pas facile. Ils estiment qu'il est plus facile et plus judicieux de construire des robots imitant les facultés et les capacités des créatures vivantes qui sont adaptées à l'environnement dans lequel le robot sera utilisé. Pour explorer les déserts, par exemple, ils vont créer un robot biomimétique semblable à un scorpion ou à une fourmi. Le livre intitulé Neurotechnology for Biomimetic Robots nous fait part de l'information suivante à ce sujet :
Les robots biomimétiques diffèrent des robots traditionnels dans le sens où ils sont plus agiles, meilleur marché et capables de réagir dans un environnement réel. L'ingénierie nécessaire à l'élaboration de ces robots exige une compréhension des systèmes biologiques sur lesquels ils se basent, à un niveau à la fois biomécanique et physiologique.
... L'objectif ultime est de développer un robot autonome, capable de se diriger et de réagir dans un environnement à l'aide de réponses sensorielles et sans intervention d’opérateur humain.103
 |  |  |
Ce qui a poussé les scientifiques à imiter les créatures vivantes était la perfection de leur structure. L'ingénieur Hans. J. Schneebeli, créateur du système de robotique connu sous le nom de "Karlsruhe Hand", a déclaré que plus il travaillait sur les mains mécaniques, plus il admirait la main humaine. Il a avoué qu’il faudrait encore beaucoup de temps pour que les scientifiques réussissent à reproduire les plus petites tâches effectuées par une main humaine.104
Au cours de certains projets, les scientifiques qui travaillent dans des domaines aussi différents que l'informatique, la mécanique, l'électronique, les mathématiques, la physique, la chimie et la biologie ont rassemblé leur connaissance pour imiter juste une seule des caractéristiques d'une créature vivante. Cependant les partisans de l'évolution continuent de prétendre que ces structures complexes et fascinantes seraient apparues spontanément et de leur propre gré.
La robotique imite les serpents pour résoudre les problèmes d'équilibre
Selon les spécialistes en robotique, l'un des problèmes majeurs rencontrés est de maintenir l'équilibre. Même les robots équipés des dernières innovations technologiques peuvent perdre l'équilibre en marchant. Un enfant de trois ans réussit à retrouver son équilibre sans aucun problème, mais les robots, qui ne possèdent pas cette faculté, sont par conséquent peu mobiles et peu utiles. Citons en exemple l’un des robots conçus par la NASA pour effectuer des missions sur Mars et qui n'a pas pu être utilisé pour cette raison. Suite à cela, les experts en robotique ont abandonné toute tentative de réaliser un mécanisme de contrôle de l'équilibre et se sont mis à observer une créature qui ne perd jamais l'équilibre, le serpent.
Contrairement aux autres vertébrés, les serpents de lac possèdent une colonne vertébrale et des membres rigides afin de pouvoir pénétrer à l’intérieur des crevasses et des anfractuosités. Ils peuvent étirer ou contracter leurs corps, s'accrocher aux branches et glisser sur les rochers. Ces caractéristiques spécifiques des serpents ont inspiré la création d’un nouveau prototype de robot développé par le Ames Research Center de la NASA et appelé le "Snakebot". Ce robot fut conçu afin de pouvoir rester constamment en équilibre sans être déstabilisé par les obstacles.105
 |  |
L'organe de l'équilibre de l'oreille interne étonne les experts en robotique
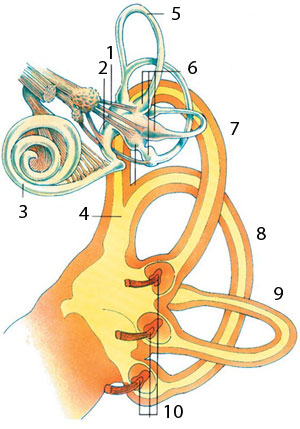 | |
1. Nerfs auditifs | 6. Ampoules des canaux semi-circulaires |
L'oreille interne assure un rôle fondamental pour notre équilibre en contrôlant tout notre corps à chaque instant et en nous permettant d'effectuer des ajustements aussi précis que ceux d'un funambule.
Ce centre d’équilibre de l'oreille interne, connu sous le nom de vestibule, comporte trois canaux semi-circulaires. Chacun mesure 6,5 mm de diamètre, et dans la partie transversale, l'espace intérieur mesure 4,4 mm. Les trois canaux sont disposés orthogonalement sur trois plans. Un seul canal peut détecter les rotations dans l'un des trois plans orthogonaux. Ainsi, en associant leurs résultats, les trois canaux permettent de repérer les rotations dans n'importe quelle direction de l'espace en trois dimensions.
A l'intérieur de chaque canal se trouve un liquide visqueux. A l'une des extrémités se trouve un bouchon gélatineux (la cupule), qui se tient sur une zone bombée (crête acoustique) recouverte de cellules ciliées. Lorsque nous tournons la tête, marchons ou réalisons un mouvement, le fluide contenu dans ces canaux reste en retrait à cause de l'inertie. Le fluide repousse la cupule, la faisant dévier. Cette déflexion est mesurée par les cellules ciliées de la crête acoustique tandis que les vibrations des cils modifient l'équilibre ionique des cellules qui leur sont reliées, produisant de cette manière des signaux électriques.
Ces signaux produits à partir de l'oreille interne sont transmis par influx nerveux au cervelet situé à l'arrière du cerveau. Ces nerfs transmetteurs qui relient le vestibule au cervelet contiennent environ 20.000 fibres nerveuses.
Le cervelet interprète l’information qui vient du vestibule, mais afin de maintenir l'équilibre, il a besoin d'informations supplémentaires. Par conséquent, le cervelet reçoit en continue des informations provenant des yeux et des muscles du corps ; Il les analyse rapidement et calcule ainsi la position du corps en fonction de la gravité. Puis, à partir de ces calculs instantanés, il informe les muscles à travers les nerfs des mouvements précis à exécuter pour maintenir l'équilibre.
Ces processus extraordinaires se déroulent en moins d'un centième de seconde. Nous sommes capables de marcher, courir, faire du vélo, pratiquer un sport sans même nous rendre compte de tout ce qui se passe. Mais si nous devions mettre par écrit tous les calculs effectués à l'intérieur du corps en un instant, la formule tiendrait sur des milliers de pages.
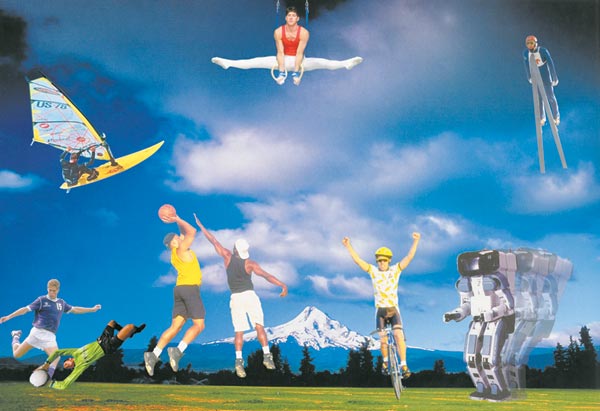 |
Le statut d'équilibre est possible grâce à un système d'une extraordinaire complexité, le corps humain étant constamment en mouvement. Cela signifie que le cerveau doit perpétuellement recalculer le centre de gravité corporel et envoyer les instructions aux muscles. |
Notre système d'équilibre si parfait fonctionne au moyen de mécanismes très complexes, tous interconnectés et travaillent ensemble. Il reste encore à la science et à la technologie moderne à découvrir toutes les particularités de ces modes opératoires.
Il est impossible qu'une structure aussi complexe ait pu apparaître par hasard, comme voudraient nous le faire croire les partisans de l'évolution. Chaque concept révèle l'existence d'un créateur conscient. Le principe élaboré de notre gestion de l’équilibre est l'une des preuves de l'existence d’Allah, Qui a crée ce système de manière parfaite grâce à Son infinie sagesse.
Face à une telle réalisation, il convient à l'homme de rendre grâce à Allah, Qui l'a doté d'un tel système.
Un robot scorpion capable de supporter des conditions désertiques difficiles
Aux Etats-Unis, la Défense Advanced Research Projects Agency (DARPA-Agence pour les projets de recherche avancée de défense), une agence du Ministère de la Défense Américain, travaille dans le but de développer un robot scorpion. La raison pour laquelle l'équipe a choisi un scorpion comme modèle est que le robot a pour mission d'opérer dans le désert. Les scorpions ont depuis toujours réussi à survivre aux conditions difficiles des zones désertiques. Mais l'autre raison d'avoir choisi un scorpion est que ce dernier est capable de se mouvoir facilement sur des terrains accidentés et que ses réflexes sont beaucoup plus simples que ceux des mammifères - et peuvent ainsi être imités plus facilement.
Avant de développer leur robot, les chercheurs ont passé beaucoup de temps à observer les mouvements d'un scorpion en utilisant des caméras et en analysant les informations vidéo obtenues.107 Ils ont ensuite commencé leur projet en imitant l'agencement et la coordination des pattes du scorpion.
 |  |
L’objectif de l'équipe est d'obtenir un robot scorpion de 50 cm capable d'atteindre une cible située à 40 Km dans le désert et revenir à son point de départ de façon totalement autonome et sans recevoir d'ordre.108
Conçu par Frank Kirchner et Alan Rudolph de l'Université de Northeastern à Boston, ce robot ne sait pas réfléchir sur des problèmes complexes. Face à une difficulté il utilise ses réflexes. Ce qui lui permet d'éviter tout obstacle rencontré sur son parcours - comme un rocher par exemple. Le robot est muni de deux capteurs ultrasons à l’avant. Dans le cas où il rencontrerait un obstacle qui mesure plus de la moitié de sa taille, le robot tentera de le contourner. Si le capteur situé sur le côté gauche identifie un obstacle, le robot se dirigera à droite. On peut demander au robot de se diriger dans une région particulière, et grâce à la caméra située dans sa queue, de transmettre les images au camp de base.
L'armée américaine fut très impressionnée par les essais effectués en Arizona. Elle espère que les capacités du robot à trouver son chemin vers une cible puissent être utiles lors des combats menés dans des villes où les champs de bataille sont particulièrement encombrés.109
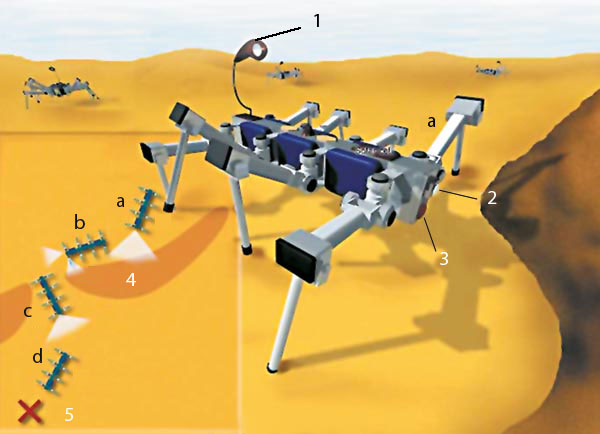 |
1. Connexions vidéo et radio, 2. Capteurs ultrasons, 3. Capteurs infrarouges , 4. Terrain rocailleux,5.Cible |
a. Quand le robot scorpion rencontre un rocher, il commence par le scanner à l'aide d'ultrasons afin de décider s'il peut grimper dessus. |
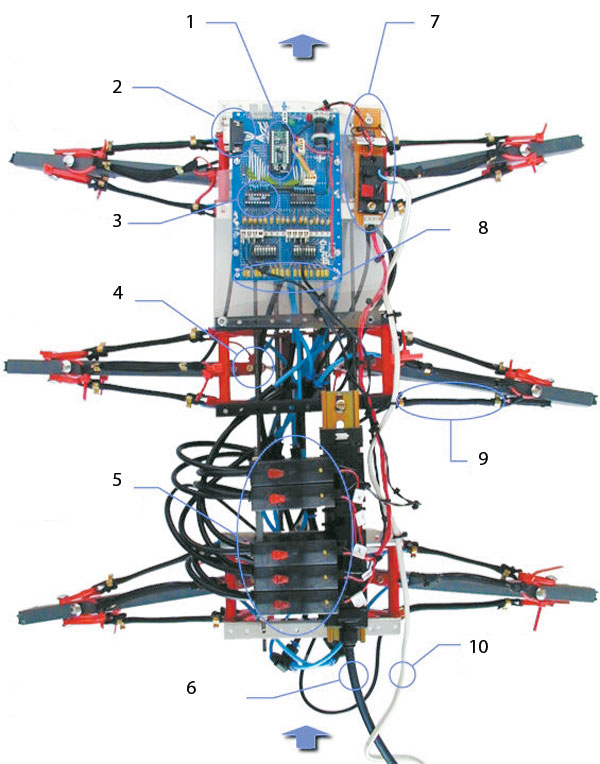 | |
1. Puce de contrôle qui détermine quelle sera la première étape | 7. Régulateur de 6V pour la puce de contrôle et de transmission |
Le robot scorpion, construit grâce à des technologies avancées, est doté d'un système complexe. Malgré l'investissement de nombreux scientifiques et ingénieurs sur ce projet, ce robot ne peut se déplacer qu'en direction de cibles prédéfinies. | |
Le robot qui identifie les courants marins comme le homard
Même les plongeurs les mieux équipés ont des difficultés à se mouvoir à travers les eaux turbulentes et obscures, et rompent parfois sur des fonds marins rugueux, sableux et recouverts d'algues. Les homards peuvent le faire très facilement. Mais jusqu'à présent, aucun robot conçu pour être utilisé en milieu marin n'est parvenu à un résultat satisfaisant.
Joseph Ayers, directeur du centre de science marine de l'Université de Northeastern à Boston, dirige un projet pour pouvoir développer un robot qui imite le homard, il le décrit ainsi: "l'objectif technique du projet est de saisir les avantages des performances de l'animal dans cet environnement spécifique."110
Ils espèrent pouvoir utiliser ce "robo-lobster" pour détecter et désamorcer les mines. Ayers affirme que le robot sera parfaitement adapté pour ce type de travail :.
… La suite d'actions réalisées par un homard à la recherche de nourriture correspond exactement à ce que nous voulions que le robot effectue afin de trouver et de neutraliser les mines enterrées.111
La forme des homards les aide à résister aux courants tumultueux. Ils sont capables de progresser dans la direction voulue et ce, dans les conditions les plus difficiles, même sur des terrains très escarpés. De la même façon, le robot inspiré du homard va utiliser sa queue et ses pinces afin de maintenir son équilibre..
Sur le robot, des micro-capteurs électromécaniques (MEMS) imitent les organes sensoriels du homard. Equipé de capteurs et d'antennes sensibles aux courants, le robot peut adapter ses mouvements en fonction des courants environnants. Un homard utilise ses cils pour déterminer la direction des courants, et les capteurs sensoriels du robot ont été conçus pour réaliser la même fonction.112
 |  |
Lobster | Robo-lobster |
La technique du homard pour identifier les parfums
 Sous l'eau, les créatures telles que le crabe ou le homard utilisent leur odorat pour trouver de la nourriture ou pour échapper aux prédateurs. Une étude menée par les chercheurs des universités californiennes de Berkeley et de Standford ont révélé comment les homards humaient le monde environnant.
Sous l'eau, les créatures telles que le crabe ou le homard utilisent leur odorat pour trouver de la nourriture ou pour échapper aux prédateurs. Une étude menée par les chercheurs des universités californiennes de Berkeley et de Standford ont révélé comment les homards humaient le monde environnant.
Les homards possèdent un odorat très sensible, dont les caractéristiques vont ouvrir de nouveaux horizons pour les ingénieurs qui tentent d'inventer de nouveaux capteurs olfactifs. Mimi A. R. Koehl, professeur de biologie au collège des lettres et sciences à l'Université de Californie, Berkeley, déclare :
Si vous voulez construire des robots capables d'aller dans des zones dangereuses où vous ne pouvez pas envoyer de plongeurs sous-marins, et si vous souhaitez qu’ils localisent une chose précise grâce à l'odorat, vous devez concevoir un nez ou des antennes olfactives.113
Les homards ainsi que d'autres crustacés sentent en dirigeant leur paire d'antennes vers le point d'origine de l'odeur, afin que les cils chimiquement sensibles situés à l'extrémité des antennes entrent en contact avec les molécules odorantes transportées. La langouste blanche Panulirus argus, qui vit dans les eaux caribéennes possède des antennules de 30 cm de longueur. Sur le côté externe de l'une des extrémités de ses antennules se trouvent des cils semblables à une brosse - une zone particulièrement sensibles aux produits chimiques.
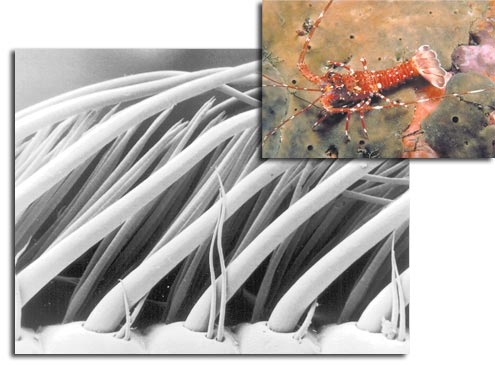 |
Poils sur les antennules de homard |
Un groupe de chercheurs dirigé par le professeur Koehl a réalisé un homard mécanique qui fait bouger ses antennules de la même façon. Les tests et observations menées sur ce robot, Rasta Lobsta, furent entrepris afin d'étudier en détail les techniques utilisées par les homards pour sentir.
Lorsque le homard veut sentir quelque chose, il agite ses antennules dans l'eau lors de sa descente afin que les odeurs transportées puissent entrer en contact avec les cils. Sur le retour, il se déplace plus lentement, si bien que l'eau ne peut pas bouger entre les cils et les odeurs ainsi capturées resteront emprisonnées jusqu'à la prochaine descente plus rapide.
Les antennules bougent d'avant en arrière à une vitesse idéale pour que le homard puisse sentir. Des tests ont montré que si les antennules bougeaient plus lentement, l'eau ne remuerait pas entre les cils, ce qui réduirait les capacités olfactives des crustacés. Ainsi, le homard utilise ses antennules afin de différencier les odeurs capturées entre ses cils.
La constitution des muscles des vers pour de nouveaux systèmes mécaniques
 |
La peau qui recouvre le corps cylindrique du vers est composée de fibres qui s'enroulent en une forme hélicoïdale autour et au long du corps - une structure remarquable. La contraction des parois musculaires du corps entraîne une augmentation de la pression interne, ainsi le vers est capable de changer de forme tandis que les fibres de la peau lui permettent de passer d'une forme courte et épaisse à une forme allongée et fine. C'est le principe de déplacement du vers.
Ce système mécanique inégalé est actuellement une source d'inspiration pour les nouveaux projets entrepris par l'Université de Reading, au Centre for Biomimetics. Lors d'une expérience unique, des cylindres d'angles variés furent disposés le long du corps du ver. L'objectif étant de remplir ces cylindres avec un polymère qui absorbe l'eau sous forme de gel. L'eau permet à ce gel de se diluer. De cette façon l'énergie chimique est convertie en énergie mécanique et la pression résultante est maintenue à l'intérieur du sac hélicoïdal. Une fois que les scientifiques parviendront à contrôler le gonflement et la résorption du polymère sous forme de gel, ils espèrent que le système obtenu fonctionnera de la même manière qu'un muscle artificiel.115
Toutes les créatures vivantes que l'homme prend pour modèle et toutes leurs caractéristiques sont des signes d’Allah pour les croyants. Cette vérité s'exprime ainsi dans ce verset :
Et dans votre propre création, et dans ce qu'Il dissémine comme animaux, il y a des signes pour des gens qui croient avec certitude. (Sourate al-Jathya, 4)
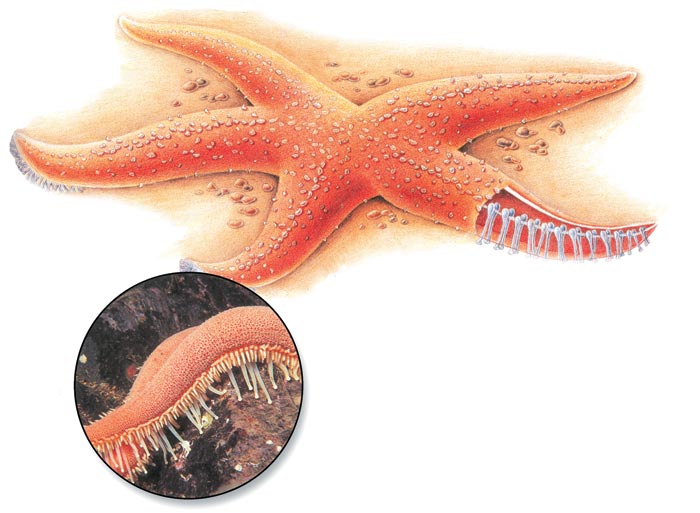 |
Les changements de forme, les étirements et les contractions par l'utilisation de la pression sont fréquemment utilisés dans la nature. Le ver, la pieuvre, l'étoile de mer et l'anémone en sont de bons exemples ; cependant les équipements technologiques n'ont que très peu recours au changement de formes. Dans ces quelques exemples, c'est la pression hydraulique qui est utilisée. Dans les ascenseurs, par exemple, du liquide est pompé à travers un cylindre afin de faire monter des objets lourds. Afin de faire descendre l'ascenseur, le cylindre est vidé et rempli à nouveau. Les étoiles de mer utilisent également la pression hydraulique pour se déplacer. Le long de ses bras, l'échinoderme possède des pattes en forme de tubes rattachées à un système tubulaire interne rempli de fluide. Quand ses muscles contractent les tubes, la pression hydraulique qui en résulte envoie du fluide vers les pattes. En utilisant ses muscles, l'étoile de mer se sert de la force hydraulique pour créer un mouvement ondulatoire des pattes d'avant en arrière, ce qui lui permet d'avancer dans une direction précise. |
Les pattes du gecko ouvrent de nouveaux horizons technologiques
 Ces petits lézards sont capables de courir très vite le long des murs et de grimper au plafond très facilement. Jusqu'à très récemment, nous ne comprenions pas comment il était possible qu'un vertébré puisse grimper aux murs comme le héros Spiderman dans la BD. A présent, et après des années de recherches, les scientifiques ont fini par découvrir le secret de cette extraordinaire faculté. Les petits pas du gecko ont permis de faire des découvertes fascinantes ayant des implications considérables, en particulier pour les spécialistes en robotique. Certaines découvertes sont résumées ci-après :
Ces petits lézards sont capables de courir très vite le long des murs et de grimper au plafond très facilement. Jusqu'à très récemment, nous ne comprenions pas comment il était possible qu'un vertébré puisse grimper aux murs comme le héros Spiderman dans la BD. A présent, et après des années de recherches, les scientifiques ont fini par découvrir le secret de cette extraordinaire faculté. Les petits pas du gecko ont permis de faire des découvertes fascinantes ayant des implications considérables, en particulier pour les spécialistes en robotique. Certaines découvertes sont résumées ci-après :
- Les chercheurs californiens pensent que les orteils "collants" du lézard peuvent aider à concevoir un adhésif autonettoyant qui reste sec.116
- Les pattes du gecko produisent un adhésif 600 fois plus efficace que tout adhésif présent sur le marché. Les robots qui s’inspirent du gecko pourraient grimper aux murs des bâtiments en feu pour sauver les personnes encore coincées à l'intérieur. Les adhésifs secs pourraient avoir d'énormes avantages dans les petits appareils tels que les applications médicales et ordinateurs.117
- Leurs pattes agissent comme des ressorts et répondent automatiquement dès qu'elles touchent une surface. C'est une caractéristique adaptée au fonctionnement du robot, qui ne dispose pas de cerveau. Les pattes du gecko sont toujours aussi performantes, quelle que soit l'intensité avec laquelle l'animal les utilise ; elles sont autonettoyantes et elles fonctionnent aussi sous l'eau.
- Un adhésif sec pourrait servir à maintenir en place les parties lisses du corps humains durant les interventions chirurgicales.119
- Un tel adhésif pourrait améliorer l'adhérence des pneus à la route.120
- Les robots qui imitent le gecko pourraient être utilisés pour réparer les fissures dans la coque des navires, des ponts et des terminaux, ainsi que pour l'entretien régulier des satellites.121
- Les robots conçus en s'inspirant des pattes du gecko pourraient être utilisés pour laver les vitres, les sols et les plafonds. Non seulement ils seraient capables de grimper le long de parois verticales, mais également de contourner les obstacles rencontrés sur leur chemin.122
 |
Dipnotes
103 “Neurotechnology for Biomimetic Robots” de Joseph Ayers, Joel L. Davis and Alan Rudolph, http://mitpress.mit.edu/catalog/item/default.asp?sid=059CE164-6183-4410-8320-D5828734B95A&ttype=2&tid=8812
104 Pour plus d'informations veuillez vous référer à Pour les gens doues d'intelligence, de Harun Yahya. http://www.harunyahya.fr/livres/science/intelligence/terre01.php
105 “How Snakebots will Work” de Kevin Bonsor, Howstuffworks ; http://www.howstuffworks.com/snakebot.htm
106 "Walk like a scorpion" de Duncan Graham-Rowe, NewScientist ; 21 avril 2001
107 “Biological Analysis” AIS Approach ; http://ais.gmd.de/BAR/SCORPION/biology.htm
108 Ibid.
109 "Walk like a scorpion" de Duncan Graham-Rowe, NewScientist ; 21 avril 2001
110 “Robots mimic living creatures” de Yvonne Carts-Powell, OE Reports; http://www.spie.org/web/oer/september/sep00/cover1.html
111 Ibid.
112 Ibid.
113 “Lobster sniffing: how lobsters’ hairy noses capture smells from the sea” de Robert Sanders, UC Berkeley Campus News, 30 novembre 2001 ; http://www.berkeley.edu/news/media/releases/2001/11/30_lobst.html
114 Ibid.
115 Projects at the Centre for Biomimetics ; http://www.rdg.ac.uk/Biomim/projects.htm
116 BBC News Online, 7 juin 2000 ; http://news.bbc.co.uk/low/english/sci/tech/newsid_781000/781611.htm
117 World Wealth International, vol. 1, no : 1 février 2001 ; http://www.worldwealth.net/samplemag/ArticleGeckoPrint.html
118 "Robo-Geckos" de Fenella Saunders, Discover, Septembre 2000, vol. 21, no : 9
119 Ibid.
120 Ibid.
121 Ibid.
122 Ibid.
- Introduction
- Materiaux intelligents
- Le modele des plantes et le biomimetisme
- Boites de vitesse et turbomoteurs dans la nature
- L'utilisation des vagues et des vibrations
- Creatures vivantes et technologies de vol
- Ce que nous pouvons apprendre des animaux
- Les organes plus performants que la technologie
- Biomimetisme et architecture
- Robots qui imitent les creatures vivantes
- Technologies dans la nature
- Conclusion