Robots that Imitate Living Things
Like areas contaminated with radioactivity and deep space, the depths of the sea are dangerous places for human beings. Improvements in electronics and computer technology have let us construct robots that can work in such places. Eventually, this discipline split away from electronics and mechanics to form a branch of science in its own right—robotics. These days, those who work with robotics have a new concept on their agenda: biomimetic robotics.
Scientists and engineers engaged in robotics now believe that designing robots for a particular task isn't very practical. They consider it easier and makes better sense to build robots that imitate the features and abilities of living things, indigenous to the environments where these robots are to be employed. For desert exploration, for example, they'll create a biomimetic robot resembling a scorpion or an ant. A book called Neurotechnology for Biomimetic Robots contains the following information on this subject:
Biomimetic robots differ from traditional robots in that they are agile, relatively cheap, and able to deal with real-world environments. The engineering of these robots requires a thorough understanding of the biological systems on which they are based, at both the biomechanical and physiological levels.
... The ultimate goal is to develop a truly autonomous robot, one able to navigate and interact with its environment solely on the basis of sensory feedback without prompting from a human operator.103
What led scientists to imitate living things was their flawless physical designs. Engineer Hans J. Schneebeli, designer of the robotic device known as the Karlsruhe Hand, stated that the more he worked on robotic hands, the more he admired the human hand. He added that they still need plenty of time to duplicate even a few of the many tasks that a human hand can accomplish.104
On occasion, scientists from such different disciplines as computer technology, mechanics, electronics, mathematics, physics, chemistry and biology must join forces to replicate just one feature of a living creature. Yet evolutionist thinking still maintains that the extraordinarily complex structures of living things could have come about unplanned, of their own accord.
 |  |  |
Robotics Is Imitating Snakes to Overcome the Problem of Balance
For those engaged in robotics, one of the problems they encounter most frequently is maintaining equilibrium. Even robots equipped with the very latest technology can lose their balance when walking. A three-year-old child can manage to regain balance with no difficulty, yet robots lacking this ability are, of necessity, stationary and of very little use. In fact, one robot that NASA prepared for duty on the planet Mars couldn't be used at all, for that very reason. After that, robot experts abandoned attempts to build a balance-establishing mechanism and instead looked to a creature that never loses its balance—the snake.
Unlike other vertebrates, snakes lack a hard spine and limbs, and have been created in such a way as to enter cracks and crevices. They can expand and contract the diameter of their bodies, can cling to branches and glide over rocks. Snakes' properties inspired for a new robotic, interplanetary probe developed by NASA's Ames Research Center which they called the "snakebot." This robot thus was designed to be in a constant state of balance, without ever getting caught up by obstacles.105
 |  |
The Balance Center in the Inner Ear Astounds Robotics Experts
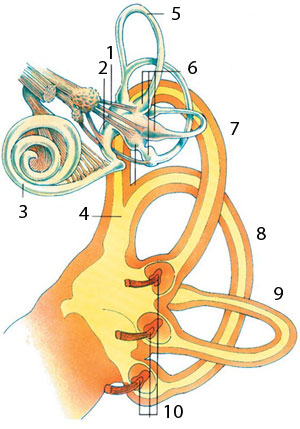 | |
| 1. Ampullary nerves | 6. Ampullae |
The inner ear performs a vital role in our system of balance, controlling our whole body at every moment and allows us to perform the delicate adjustments required by a tightrope walker, for example.
This center of balance in the inner ear, known as the labyrinth, consists of three small semicircular canals. They are 6.5 mm (0.26 in) in diameter and, in cross-section, the hollow space inside them measures 0.4 mm (0.016 in). The three are laid out in orthogonal planes. An individual canal senses rotations in one of three orthogonal directions. Thus the three canals combine their results and give the ability to sense rotations in any direction in three-dimensional space.
Inside each of these three canals is a viscous fluid. At one end of the tube is a gelatinous cap (cupula), which sits on a bulged area (crista)covered with sensory hair cells. When we turn our heads, walk, or make any movement, the fluid within these canals lags behind because of inertia. The fluid pushes against the cupula, deflecting it. This deflection is measured by the hair cells in the crista as the hairs' vibration alters the ion balance in the cells connected to them, producing electrical signals.
These signals produced in the inner ear are transmitted by means of nerves to the cerebellum at the back of our brain. These transmitter nerves from the labyrinth to the cerebellum have been shown to contain 20,000 nerve fibers.
The cerebellum interprets this information from the labyrinth, but in order to maintain balance, it also needs other information. Therefore, the cerebellum receives constant information from the eyes and from muscles throughout the body, rapidly analyzing all this information and calculating the body's position relative to gravity. Then, based on these instant calculations, it notifies the muscles via the nerves of the exact movements they should make to maintain balance.
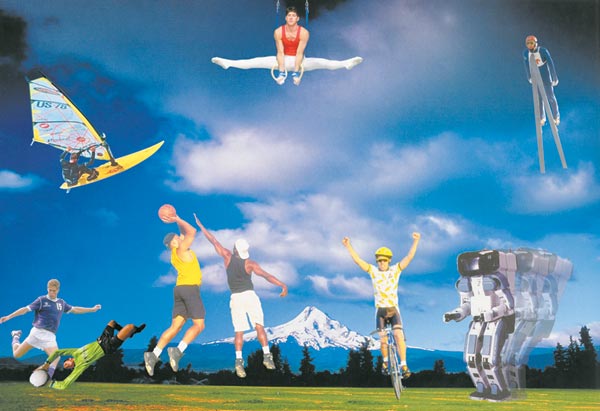
These extraordinary processes occur in less than 1/100th of a second. We are able to walk, run, ride a bicycle, and play sports without even being aware all this is going on. Yet if were we to put down on paper all the calculations going on in our bodies at any one instant, the formulae would fill thousands of pages.
Totally flawless, our balance system functions by means of several very complex mechanisms, all interconnected and working together. Modern science and technology have yet to unravel all the details of their operative principles, let alone imitate them.
It is of course impossible for such a complex design to have come about by chance, as evolution theory would have us believe. Every design reveals the existence of a conscious designer. Our balance system's superior design is one more proof of the existence of God, Who created that system so impeccably, and of His infinite wisdom.
In the face of this realization, man's responsibility is to give thanks to God, Who gave him such a structure.
 |
| Balance is brought about by a most extraordinarily complicated system, since the human body is in constant motion. That means the brain must constantly recalculate the body’s center of gravity, and send instructions to the muscles in light of this. |
A Robot Scorpion Able to Withstand Harsh Desert Conditions
In the United States, Defense Advanced Research Projects Agency (DARPA) is working to develop a robot scorpion. The reason the project selected a scorpion as its model is that the robot was to operate in the desert. Scorpions have been able to survive harsh desert conditions ever since their creation. But another reason why DARPA selected a scorpion was that along with being able to move over tough terrain very easily, its reflexes are much simpler than those of mammals—and can be imitated.106
Before developing their robot, the researchers spent a long time observing the movements of live scorpions using high-speed cameras, and analyzed the video data.107 Later, the coordination and organization of the scorpion's legs were used as a starting point for the model's creation.
DARPA's objective is to have its 50 cm (20 in)robot scorpion reach a target 40 km (25 miles)away in the desert and then return—entirely on its own, without receiving any directions.108
 |  |
Designed by Frank Kirchner and Alan Rudolph at Northeastern University in Boston, the robot has no ability to "think through" complex problems. Upon encountering a difficulty, it merely relies on its reflexes. This allows it to overcome any obstacles that might impede its progress—a rock, for example. At the front, the robot has two ultrasonic sensors. Should it encounter an obstacle more than half its own height, it will try going around it. If the detector on the left identifies an obstacle, it will turn to the right. The robot can be asked to go to a specific region and, with a camera in its tail, send back to base images of the location.
The U.S. Army was greatly impressed by the trials held in Arizona. It is hoped that the robot's ability to find its way to a target are could be particularly useful in cluttered battlefields such as towns.109
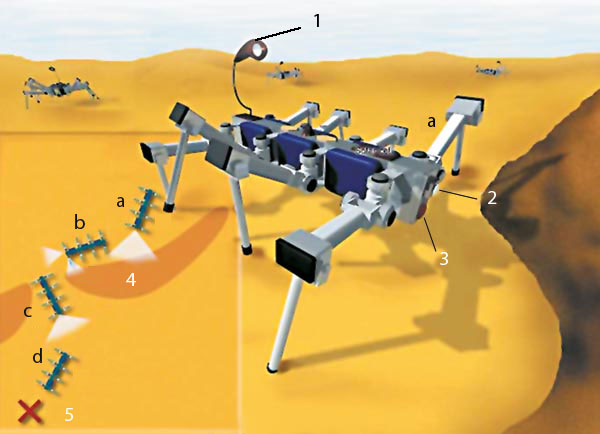 | ||
| 1. Camera and radio connections | 3. Infrared sensors | 5. Target |
| a. When the robot scorpion encounters a rock, first it scans it with ultrasound to decide whether it’s too high to climb. | ||
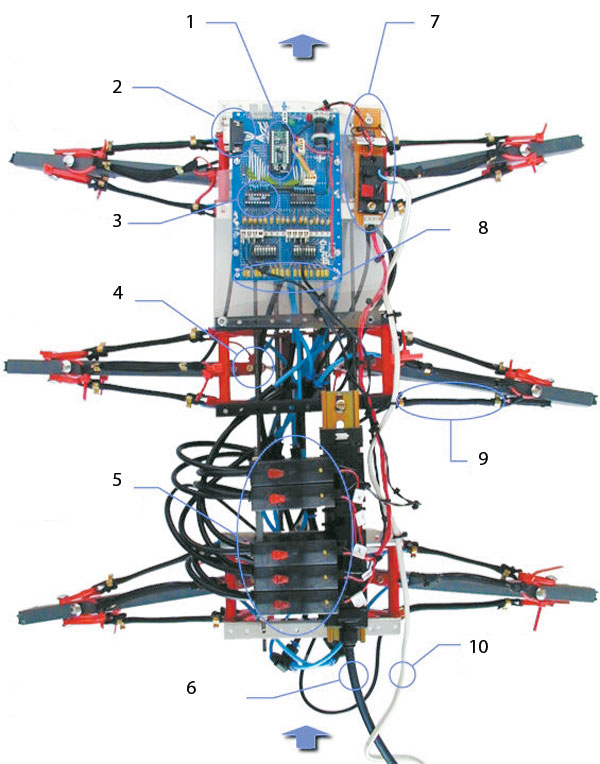 | |
| 1. Control chip, which determines which step will be taken first | 6. External air cable, which feeds the air valves with 6-bar air |
| The scorpion robot, built using advanced technology, possesses a complex structure. Even though a great many scientists and engineers worked on this robot, it can only travel towards a pre-established target. | |
Robo-lobster, Sudaki Akıntıları Istakozun Belirlediği Gibi Belirleyecek
Just Like a Real Lobster, This Robot Will Identify Water Currents
Even fully-equipped human divers have difficulty in moving through turbulent and murky waters, crawling along the bottom where it may be rough, sandy or covered with algae. Lobsters can, and very easily too. But so far, no robot made for use on the sea bed has been successful in such environments.
Joseph Ayers, Director of the Marine Science Center at Northeastern University in Boston is leading a project to develop a robot that imitates the lobster. As he describes it, the project's "technical goal is to capture the performance advantages that the animal systems hold in the target environment."110
They expect to use this "robo-lobster" in finding and disarming mines. Ayers says the robot will be ideally suited to this kind of work:
... the sequence of behavioral acts that a lobster performs when it searches for food is exactly what one would want a robot to perform to find and neutralize underwater mines.111
Lobsters' shape helps them resist tumbling or moving in fast-moving water. They are able to proceed in the direction they want under the most difficult conditions, even over very rough terrain. In the same way, the robo-lobster will use its tail and claws for stability.
On the robot, micro-electro-mechanical sensors (MEMS) imitate the lobster's sensory organs. Equipped with water current sensors and antennae, the robot can adapt its movements to the currents of the water around it. A live lobster uses hairs to determine the direction of currents, and the robot lobster's electro-mechanical sensors are intended to do the same thing.112
 |  |
| Lobster | Robo-lobster |
The Lobster's Technique for Identifying Scents

Underwater creatures such as crabs and lobsters use their sense of smell to find food, mates or to flee from predators. One study carried out by researchers from the Universities of California at Berkeley and Stanford revealed how lobsters smell the world around them.
Lobsters possess a very sensitive sense of smell, whose features will open up new horizons for robot engineers trying to build new odor sensors. Mimi A. R. Koehl, a professor of integrative biology in the College of Letters & Science at University of California, Berkeley, says:
If you want to build unmanned vehicles or robots to go into toxic sites where you do not want to send a scuba diver, and if you want those robots to locate something by smell, you need to design noses or olfactory antennae for them.113
Lobsters and other crustaceans smell by flicking a pair of antennules toward the source of the odor, so that the chemosensory hairs on the ends of the antennules come into contact with the water-borne odor molecules. The spiny lobster Panulirus argus, which lives in the Caribbean Sea, has antennules 30 cm (3 to 4 inches) in length. On the outer edge of one of the split ends of its antennules are hairs resembling a brush—a region particularly sensitive to chemicals.
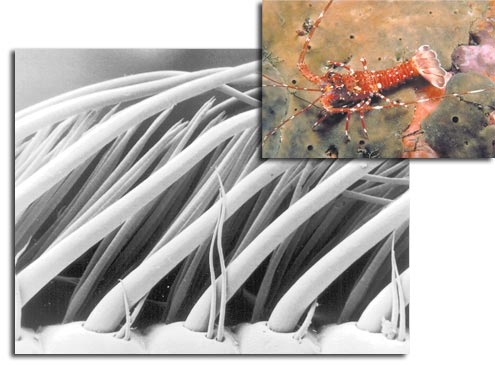 |
| Hairs on the lobster antennule |
A group of researchers led by Professor Koehl made a mechanical lobster that flicked its antennules in the same way. Tests and observations of this robot, dubbed Rasta Lobsta, were performed to study in detail the technique that lobsters employ in order to smell.
When the lobster wants to smell something, during the downstroke, it pushes the antennule through the water fast enough for the water bearing the odor to penetrate into the brush of sensory hairs. On the return stroke, however, it sweeps more slowly, so the water is unable to move between the hairs and the odor plume that penetrated between the hairs during the downstroke are trapped until the next rapid downstroke.
The antennules move forward and back at the ideal speed for the lobster to be able to smell. Tests have shown that if the antennules moved more slowly, the water would not flow between the hairs, reducing the crustacean's ability to smell. Therefore, it uses its antennules in such a manner that it's able to preserve and capture even small differences in odor concentration in a plume.114
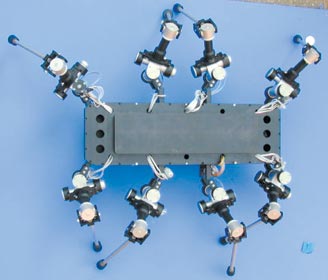
Structure of Worm Muscles Lead the Way to New Mechanical Systems
 |
The skin covering a worm's cylindrical body consists of fibers that are wound in a crossed helical form around and along the body—a most impressive design. The contraction of muscles in the body wall leads to an increase in the internal pressure, and the worm is able to change shape as the fibers in the skin allow it to go from short and fat to long and thin. This is the basis of how worms move.
This matchless mechanical system is presently inspiring new projects at Reading University's Centre for Biomimetics. In one experiment, cylinders of various fiber angles were arranged along the lines of the worm's anatomy. The plan is to fill these cylinders with a water-absorbent polymer gel. Water causes this gel to expand. In this way, chemical energy is converted to mechanical energy in just the right place, and the resulting pressure will be contained safely inside the helically-wound bag. Once the swelling and contracting of the polymer gel is controlled, it is hoped that the resulting system will operate like an artificial muscle.115
Every living thing that man takes as a model, and every system in it, is a sign of God for those who believe. This truth is expressed in a verse:
And in your creation and all the creatures
He has spread about there are signs for people with certainty.
(Qur'an, 45: 4)
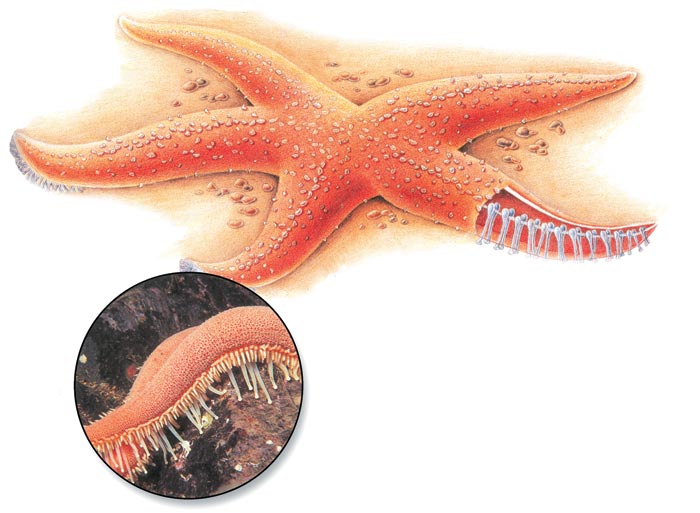 |
| Changing shape, expanding and contracting by the use of pressure, is frequently used in nature. The worm, octopus, starfish and anemone are some of the best examples; yet shape-changing is found much less frequently in technological equipment. In those few examples that do exist, hydraulic pressure is employed. In lifts, for example, hydraulic liquid is pumped into a thin cylinder to raise heavy objects. To lower the lift, the cylinder is emptied again. Starfish also use hydraulic pressure to move. Along the undersides of its arms, the echinoderm possesses tube-like feet, attached to an internal, fluid-filled tubing system. When its muscles contract the tubes, the resulting hydraulic pressure sends fluid to the feet. Using its muscles, the starfish uses hydraulic power to set up a wave motion in its feet, moving forward and back and allowing the starfish to progress in one direction. |
The Gecko's Feet Open New Technological Horizons

These small lizards are able to run very fast up walls and walk around clinging to the ceiling, very comfortably. Until recently, we didn't understand how it could be possible for any vertebrate animal to climb up walls like the cartoon and film hero Spiderman. Now, years of research have finally uncovered the secret on which their extraordinary ability depends. Little steps by the gecko have led to enormous discoveries with tremendous implications, particularly for robot designers. A few can be summarized as follows:
- Researchers in California believe that the lizard's "sticky" toes can help in developing a dry, and self-cleaning adhesive.116
- Geckos' feet generate an adhesive force 600 times greater than that of friction. Gecko-like robots could climb up the walls of burning buildings to rescue those inside. Dry adhesives could be of great benefits in smaller devices, such as in medical applications and computer architecture.117
- Their legs act like springs, responding automatically when they touch a surface. This is a particularly appropriate feature for robots, which have no brain. Geckos' feet never lose their effectiveness, no matter how much they are used; they are self-cleaning and they also work in a vacuum or underwater.118
- A dry adhesive could help hold slick body parts in place during nanosurgery.119
- Such an adhesive could keep car tires stuck to the road.120
- Gecko-like robots could be used to repair cracks in ships, bridges and piers, and in the regular maintenance of satellites.121
- Robots modeled after the geckos' feet could be used to wash windows, clean floors, and ceilings. Not only will they be able to climb up flat vertical surfaces, but overcome any obstacles they meet on the way.122
 |
Footnotes
103 Joseph Ayers, Joel L. Davis and Alan Rudolph, "Neurotechnology for Biomimetic Robots;" http://mitpress.mit.edu/catalog/item/default.asp?sid=059CE164-6183-4410-8320-D5828734B95A&ttype=2&tid=8812
104 For further information see Harun Yahya's For Men of Understanding, Ta Ha Publishers, April 2003.
105 Kevin Bonsor, "How Snakebots will Work," Howstuffworks; http://www.howstuffworks.com/snakebot.htm
106 Duncan Graham-Rowe, "Walk like a scorpion," NewScientist; 21 April 2001.
107 "Biological Analysis," AIS Approach; http://ais.gmd.de/BAR/SCORPION/biology.htm
108 Ibid.
109 Duncan Graham-Rowe, "Walk like a scorpion," NewScientist; 21 April 2001.
110 Yvonne Carts-Powell, "Robots mimic living creatures," OE Reports; http://www.spie.org/web/oer/september/sep00/cover1.html
111 Ibid.
112 Ibid.
113 Robert Sanders, "Lobster sniffing: how lobsters' hairy noses capture smells from the sea," UC Berkeley Campus News, November 30, 2001; http://www.berkeley.edu/news/media/releases/2001/11/30_lobst.html
114 Ibid.
115 Projects at the Centre for Biomimetics; http://www.rdg.ac.uk/Biomim/projects.htm
116 BBC News Online, June 7, 2000; http://news.bbc.co.uk/low/english/sci/tech/newsid_781000/781611.htm
117 World Wealth International, vol. 1, no. 1, February 2001; http://www.worldwealth.net/samplemag/ArticleGeckoPrint.html
118 Fenella Saunders, "Robo-Geckos," Discover, September 2000, vol. 21, no. 9
119 Ibid.
120 Ibid.
121 Ibid.
122 Ibid.
- Introduction
- Intelligent Materials
- The Design in Plants and Biomimetics
- Gearboxes and Jet Engines in Nature
- Using Waves and Vibrations
- Living Things and Flight Technology
- What We can Learn from Animals
- Organs Superior to Technology
- Biomimetics and Architecture
- Robots that Imitate Living Things
- Technology in Nature
- Conclusion