Roboter, die Lebende Dinge Imitieren
Wie Gegenden, die radioaktiv verseucht sind und wie das Weltall, so sind die Tiefen der Meere ein gefährlicher Platz für Menschen. Verbesserungen in Elektro- und Computertechnologien lassen uns Roboter bauen, die an solchen Plätzen arbeiten können. Irgendwann brach diese Disziplin von der der Elektronik und Mechanik fort, um einen eigenen neuen Zweig der Wissenschaft zu formen- die Robotik. Heutzutage haben diejenigen, die mit Robotik arbeiten ein neues Konzept auf ihrer Agenda: die Biomimethik Robotik.
Die mit Robotik beschäftigten Wissenschaftler und Ingenieure glauben jetzt, dass das designen von Robotern für eine bestimmte Aufgabe nicht praktisch ist. Sie sehen es als einfacher an, und es macht auch mehr Sinn, Roboter zu bauen, die die Eigenschaften und Fähigkeiten von lebenden Dingen imitieren, die angepasst sind an die Umgebung, in der diese Roboter eingesetzt werden. Für eine Wüstenerkundung zum Beispiel, erschufen sie einen Roboter, der einem Skorpion oder eine Ameise ähnelt. Ein Buch mit dem Titel Neurotechnology for Biomimetic Robots (Neurotechnologie für biomimethische Roboter) beinhaltet folgende Informationen zu diesem Thema:
Biomimethische Roboter unterscheiden sich von traditionellen Robotern darin, dass sie sehr agil, relativ billig, und in der Lage sind, mit real-weltlichen Umgebungen zu Recht zu kommen. Die Ausarbeitung solcher Roboter bedarf eines sorgfältigen Verständnisses des biologischen Systems, auf dem sie basieren werden, sowohl auf dem biomechanischem als auch auf dem physiologischen Level.
… Das ultimative Ziel ist es, einem wahrlich unabhängigen Roboter zu entwickeln, der in der Lage sein wird, selber zu navigieren und mit seiner Umgebung zu interagieren, basierend alleine auf ein sensorisches Feedback ohne Eingreifen eines Menschen zum Bedienen.103
Was Wissenschaftler dazu bewegt hat Lebewesen zu imitieren war ihr fehlerloses physisches Design. Ingenieur Hans J. Schneebeli, Designer des Robotergerätes bekannt als die Karlsruher Hand, sagte, dass je mehr er an der Roboterhand arbeitete, desto mehr bewunderte er die menschliche Hand. Weiter sagte er, dass sie noch sehr viel Zeit benötigen, um nur einige der vielen Aufgaben, die die menschliche Hand vollbringen kann, kopieren zu können.104
Gelegentlich müssen sich Wissenschaftler aus den verschiedensten Disziplinen wie der Computertechnologie, Mechanik, Elektronik, Mathematik, Physik, Chemie und Biologie zusammen tun, um nur eine Eigenschaft einer lebenden Kreatur nachzubauen. Jedoch denken Evolutionisten immer noch, dass die außerordentlich komplexe Struktur eines Lebewesens nicht ungeplant daherkommt, auf eigenes Wollen.
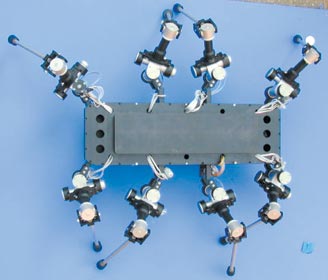
Robotik imitiert Schlangen, um Probleme mit der Balance zu überwinden
Für die in die Robotik eingebundenen ist eines der am häufigsten auftretenden Probleme das Gleichgewicht zu behalten. Sogar die mit der neuesten Technologie vollgestopften Roboter können die Balance beim Gehen verlieren. Ein drei Jahre altes Kind kann ohne Schwierigkeiten seine Balance wiedergewinnen, aber Roboter, die diese Fähigkeiten nicht haben, sind notgedrungen stationär und wenig zu gebrauchen. Tatsächlich konnte ein für den Einsatz auf dem Planeten Mars vorbereiteter Roboter der NASA gar nicht eingesetzt werden, genau aus diesem Grund. Von da an gaben Roboterexperten die Versuche auf, einen Gleichgewichtsstabilitätsmechanismus zu bauen, und stattdessen schauten sie sich eine Kreatur an, die niemals ihr Gleichgewicht verlieren – die Schlange.
Ungleich anderer Wirbeltiere besitzt die Schlange keine harte Wirbelsäule und Glieder, und wurde so erschaffen, um in Risse und Spalten zu kriechen. Sie können den Durchmesser ihres Körpers zusammenziehen oder erweitern, sich an Äste hängen und über Felsen gleiten. Die Eigenschaften der Schlangen inspirierte den Bau eines neuen Robotik, einer interplanetarischen Sonde, entwickelt vom NASA Ames Research Center, welche sie den "Snakebot" tauften. Dieser Roboter wurde daher so designt, dass er im ständigen Gleichgewicht ist, ohne jemals von einem Hindernis behindert zu werden.105
Das Gleichgewichtszentrum im Innenohr verblüffte Robotikexperten
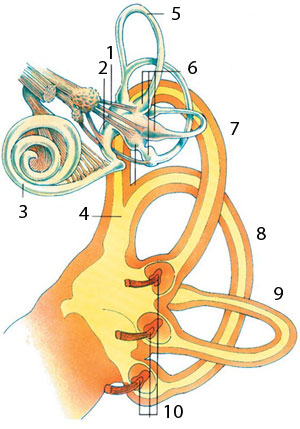 |
| 1. Ampullarische Nerven
2. Saccule
3. Innenohrschnecke
4. Endolymph-gefüllter Kanal
5. Halbkreiskanal | 6. Ampullen
7. Hinterer Halbkreisförmiger Kanal
8. Vorderer Halbkreisförmiger Kanal
9. Horizontaler Halbkreisförmiger Kanal
10. Cristae und Ampullarische Nerven |
Das Innenohr übernimmt eine wichtige Rolle in unserem Gleichgewichtssystem, kontrolliert unseren gesamten Körper in jedem Moment und erlaubt uns delikate Anpassungen durchzuführen, wie bei einem Drahtseilartisten zum Beispiel.
Das Gleichgewichtszentrum in unserem Innenohr, auch Labyrinth genannt, besteht aus drei schmalen Halbkreisförmigen Kanälen. Diese sind 6,5 mm (0.26 Inch) im Durchmesser und im Querprofil misst der Hohlkörper innen 0,4 mm (0.016 Inch). Die Drei sind wie orthogonale Ebenen angeordnet. Jeder einzelne Kanal spürt die Rotationen in einem der drei orthogonalen Richtungen. Somit kombinieren die drei Kanäle ihre Ergebnisse und ermöglichen so die Rotation in jeder Richtung im dreidimensionalen Raum zu fühlen.
In jedem der drei Kanäle schwimmt eine zähflüssige Flüssigkeit. An einem Ende der Röhre ist eine gallertartige Kappe (Cupula), welche an einer Wölbung (Crista) sitzt, die mit sensorischen Haarzellen bedeckt ist. Wenn wir unseren Kopf drehen, gehen, oder jegliche Art der Bewegung verrichten, liegt die Flüssigkeit in diesen Kanälen immer zurück, auf Grund der Trägheit. Die Flüssigkeit drückt gegen die Cupula, drückt diese ein. Dieses Eindrücken wird von den Haarzellen in der Crista gemessen sobald die Haarvibrationen die ionische Balance in den mit diesen verbundenen Zellen verändert, und erzeugt elektrische Signale.
Diese im Innenohr erzeugten Signale werden mittels Nerven an das Kleinhirn am hinteren Ende unseres Gehirns übermittelt. In diesen vom Labyrinth zum Kleinhirn übermittelten Nerven wurden bis zu 20.000 Nervenstränge gefunden.
Das Kleinhirn interpretiert diese Information vom Labyrinth, aber um das Gleichgewicht zu halten, benötigt es noch andere Informationen. Daher empfängt das Kleinhirn ständig Informationen von den Augen und Muskeln des ganzen Körpers, analysiert diese Informationen blitzschnell und errechnet die Körperposition relativer der Gravitation. Basierend auf diesen Sofortberechnungen, informiert es danach die Muskeln über die Nerven über die genauen Bewegungen, die sie zur Gleichgewichtskontrolle machen sollen.
Diese außergewöhnlichen Prozesse dauern weniger als 1/100tel einer Sekunde. So können wir gehen, laufen, Fahrradfahren, und Sport treiben, ohne uns darüber klar zu sein, was gerade abläuft. Würden wir jedoch die ganzen Berechnungen in unserem Körper, die gleichzeitig ablaufen, auf Papier schreiben, würde die Formel Tausende von Seiten füllen.
Absolut fehlerlos funktioniert unser Gleichgewicht mittels verschiedenster sehr komplexer Mechanismen, die alle miteinander verbunden sind und zusammen arbeiten. Moderne Wissenschaft und Technik müssen noch alle Details ihrer operativen Prinzipien entwirren, ganz zu schweigen davon, diese zu imitieren.
Es ist natürlich absolut unmöglich für ein solch komplexes Design durch Zufall erschaffen zu sein, wie es Evolutionstheorie glauben lassen will. Jedes Design offenbart die Existenz eines bedachten Schöpfers. Das erhabene Design unseres Gleichgewichtssystems ist ein weiterer Beweis für die Existenz Gottes, der das System so unfehlbar geschaffen hat, und Seiner unendlichen Weisheit.
Angesichts dieser Erkenntnis liegt es in der Verantwortung der Menschen Gott zu danken, Der ihnen diese Struktur gegeben hat.
 |
| Gleichgewicht wird durch ein höchst außergewöhnliches System sichergestellt, denn der menschliche Körper ist ständig in Bewegung. Das bedeutet, dass das Gehirn andauernd das Körperzentrum der Gravitation berechnen muss, und diese Anweisungen an die Muskeln weiterleitet. |
Ein Roboterskorpion, der den rauen Wüstengegebenheiten widerstehen kann
In den Vereinigten Staaten arbeitet die Defense Advanced Research Projects Agency (DARPA) an einem Roboterskorpion. Der Grund, warum das Projekt einen Skorpion als ihr Model ausgewählt hat ist, dass der Roboter in der Wüste eingesetzt werden soll. Skorpione überleben die rauen Wüstengegebenheiten seit ihrer Schaffung. Aber ein anderer Grund, warum die DARPA einen Skorpion auswählte war, dass neben der Tatsache, dass er sich sehr leicht durch sehr raues Terrain bewegen kann, seine Reflexe viel einfacher sind als das von Säugetieren – und kann so leicht imitiert werden.106
Bevor sie ihren Roboter entwickelten, verbrachten die Forscher eine sehr lange Zeit damit, die Bewegungen von lebenden Skorpionen mittels eine Hochgeschwindigkeitskamera zu beobachten, und analysierten die Videodaten.107 Später wurden die Koordination und Organisation der Skorpionbeine als Ausgangspunkt ihrer Modelkreation genutzt.
DARPA's Absicht ist es ihren 50 cm (20 Inches) langen Roboterskorpion ein 40 km (25 Meilen) entferntes Ziel in der Wüste erreichen zu lassen und wieder umzukehren – ganz alleine und ohne Richtungsanweisung.108
Designt von Frank Kirchner und Alan Rudolph an der Northeastern University in Boston, besitzt der Roboter keine Fähigkeiten komplexe Probleme zu "durchdenken". Daher ist es ihm möglich jedes Hindernis zu überwinden, das ihn in seinem Vorwärtskommen hindern könnte – einem Fels, zum Beispiel. Am Kopfende hat der Roboter zwei Ultraschallsensoren. Trifft es auf ein Hindernis, welches mehr als die Hälfte seines eigenen Gewichts wiegt, versucht er darum herum zu kommen. Wenn der Fühler auf der linken Seite ein Hindernis erkennt, dann wird er nach rechts gehen. Der Roboter kann in bestimmte Regionen gesteuert werden, und sendet von einer Kamera im Schwanzteil Bilder der Umgebung zur Basis zurück.
Die U.S. Armee war von den Probeläufen in Arizona sehr beeindruckt. Es wird sich von den Fähigkeiten des Roboters seinen Weg zum Ziel zu finden, erhofft ihn in besonders unübersichtlichen Kampfgebieten wie Städten einsetzen zu können.109
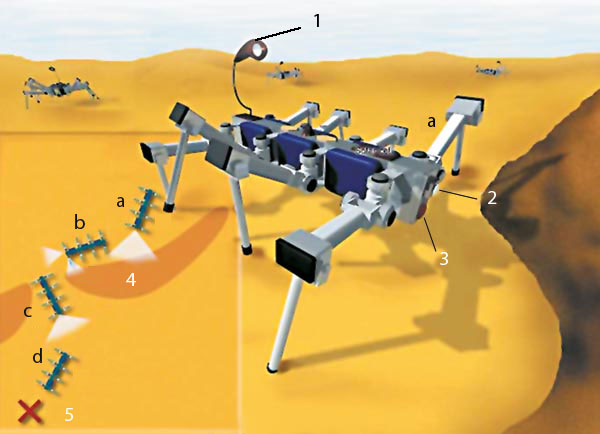 |
| 1. Kamera und Radioverbindungen
2. Ultraschallsensoren | 3. Infrarotsensoren
4. Felsiges Terrain | 5. Ziel |
| a. Wenn der Robotskorpion einen Felsen entdeckt, scannt er mit ihn mit Ultraschall, um zu entscheiden, ob er zu hoch zum besteigen ist.
b. Der Roboter bewegt sich vom Hindernis weg und geht herum, schaut mit einem Sensor nach Schluchten und mit dem anderen vorwärts.
3. Sobald er eine Schlucht findet, bestimmt er, ob sie weit genug ist, um durchzukommen. |
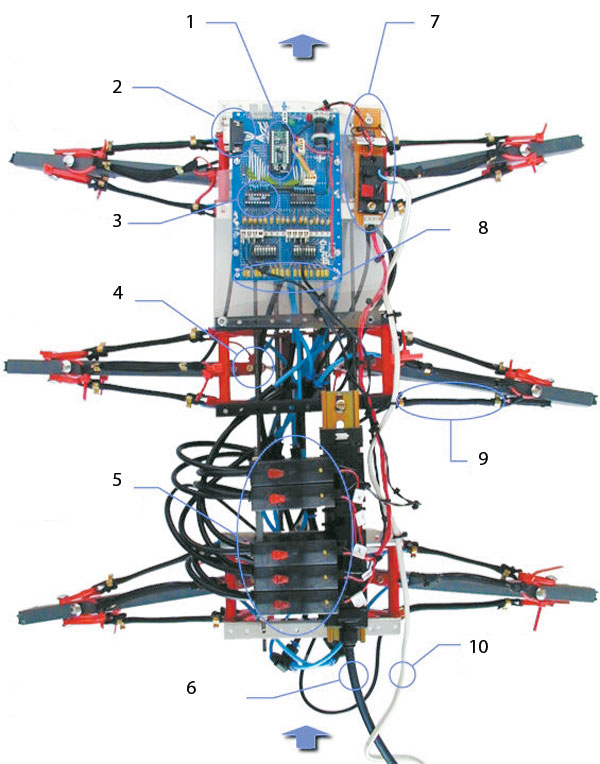 |
| 1. Kontrollchip, der bestimmt, welcher Schritt zuerst durchgeführt wird
2. Schnittstelle für das Umprogrammieren des Kontrollchips
3. Fahrchip mit je 100 mAmp
4. R2 Verbindung für Bewegungen in zwei Richtungen
5. Luftventile für beide Richtungen | 6. Äußeres Luftkabel, welches vom Luftventil 6-Bar Luft erhält
7. 6-Volt Regler für den Kontroll- und Fahrchip
8. Warnlichter für Anzeigenchip Fehlfunktion
9. Einheit für den Beinmuskel
10. Stromzuflußkabel |
| Der Skorpionroboter, gebaut mit der neuesten Technologie, besitzt eine komplexe Struktur. Obwohl eine Vielzahl von Wissenschaftlern und Ingenieuren an diesem Roboter mitgearbeitet haben, kann er nur vorwärts auf ein vorbestimmtes Ziel zusteuern. |
Genau wie ein echter Lobster kann der Roboter Wasserströmungen identifizieren
Selbst voll ausgestattete menschliche Taucher haben es schwer sich durch stürmische und dunkle Wasser zu bewegen, am Boden entlang zu schwimmen, wo es rau, sandig und Algenbedeckt ist. Lobster können das, uns zwar sehr leicht. Aber bisher war kein Roboter, der für den Einsatz auf dem Meeresboden vorgesehen war, in solch einer Umgebung erfolgreich.
Joseph Ayers, Direktor des Marine Science Center an der Northeastern Universität in Boston leitet ein Projekt, dass einen Roboter entwickeln will, der den Lobster imitieren kann. Wie er es beschreibt ist es das "technische Ziel, die Leistungsvorteile, die das tierische System in der Zielumgebung hält einzufangen."110
Sie erhoffen sich, diesen "Robo-Lobster" beim suchen und zerstöre von Minen einsetzen zu können. Ayers sagt, dass der Roboter ideal für eine solche Arbeit geeignet ist:
… die Sequenzen seines Verhaltens, die der Lobster durchläuft wenn er Futter sucht, sind genau die, die wir in einem Roboter brauchen, um Unterwasserminen zu finden und zu neutralisieren.111
Die Form des Lobster hilft ihm nicht zu stürzen oder beim vorwärtskommen in sich schnell bewegenden Wasser. Sie sind in der Lage sich in die Richtung zu bewegen, in die sie wollen, unter schwersten Bedingungen, sogar über sehr steiniges Terrain. Auf die gleiche Art und Weise nutzt der Robo-Lobster seinen Schwanz und seine Krallen für Stabilität.
Auf dem Roboter imitieren Mikro-elektro-mechanische Sensoren (MEMS) die Fühlorgane des Lobster. Ausgestattet mit Wasserströmungssensoren und –antennen kann der Roboter seine Bewegungen der Wasserströmung um ihn herum anpassen. Ein echter Lobster nutzt seine Haare, um die Richtung der Strömung zu bestimmen, und die Elektro-mechanischen Sensoren des Robot-Lobster sind dafür bestimmt, das gleiche zu tun.112
 |  |
| Lobster | Robo-lobster |
Die Techniken des Lobsters identifizieren Düfte

Unterwasserkreaturen, wie die Krabben und Lobster, nutzen ihren Geruchssinn dafür, Futter und Partner zu finden, oder vor ihren Angreifern zu flüchten. Eine Studie, die von Forschern an der Universität von Kalifornien in Berkley und Stanford durchgeführt wurde zeigte, wie Lobster ihre Umwelt erriechen.
Lobster besitzen einen sehr sensiblen Geruchssinn, dessen Eigenschaften einen ganz neuen Horizont für Roboteringenieure eröffnet, um einen neuen Geruchssensor bauen zu können. Mimi A. R. Koehl, Professorin der integrativen Biologie am College Letters & Science der Universität von Kalifornien, Berkley, sagt:
Möchte man eine unbemanntes Fahrzeug oder einen Roboter bauen, um an toxische Stellen zu gelangen, an die man keinen Taucher reinschicken möchte, und wenn man will, dass solche Roboter etwas durch seinen Geruchssinn lokalisieren kann, dann muss man für diese Nasen oder Geruchsantennen einbauen.113
Lobster und andere Krustentiere riechen durch das Wackeln ihrer Antennen in Richtung der Duftquellen, so dass die chemosensorischen Haare an den Enden der Antennen mit den vom Wasser übertragenden Duftmolekülen in Berührung kommen. Der stachelige Lobster Panulirus argus, der in der Karibischen See lebt, hat 30 cm (3 bis 4 Inches) lange Antennen. An den äußersten Enden der geteilten Antennen sind Haare, die einer Bürste ähneln – eine Region, die besonders sensibel auf Chemikalien reagiert.
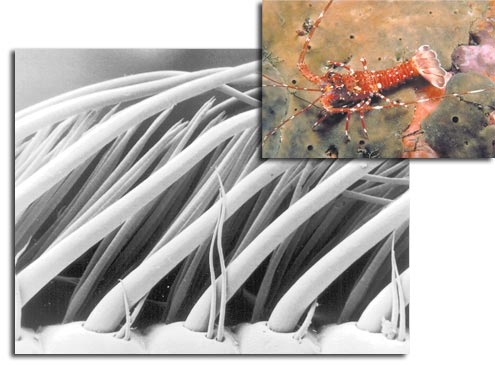 |
| Haare an den Antennen des Lobster |
Eine Gruppe Wissenschaftler, die von Professorin Koehl geleitet wird, baute einen mechanischen Lobster, der seine Antennen auf die gleiche Art und Weise bewegt. Tests mit und Beobachtung von diesem Roboter, Spitzname Rasta Lobsta, wurden durchgeführt, um die eingesetzten Techniken des Lobsters beim Riechen im Detail zu studieren.
Wenn der Lobster etwas erriechen will während des Gegenstroms, drückt er seine Antennen durch das Wasser schnell genug, damit der sich der im Wasser befindliche Geruch in die Bürste voller sensorischer Haare einbringen kann. Im Rückwärtsstrom jedoch bewegt er sich langsamer, damit sich das Wasser, das zwischen die Haaren und der Geruchsschwade eingedrungen ist, nicht bewegen kann bis der nächste schnelle Gegenstrom kommt.
Die Antennen bewegen sich mit der idealen Geschwindigkeit für den Lobster vor- und rückwärts, um riechen zu können. Tests haben gezeigt, dass, wenn die Antennen sich langsamer bewegen würden, das Wasser nicht zwischen die Haare fließt, somit die Fähigkeiten der Krustentiere zu riechen vermindert. Daher nutzt er seine Antennen so, dass er sogar kleinste Unterschiede in der Geruchskonzentration der Schwade wahrnehmen kann.114
Die Struktur der Wurmmuskeln eröffnet Wege von neuen mechanischen Systemen
Die Haut um den zylindrischen Körper eines Wurms besteht aus Fasern, die in einer gekreuzten Spiralform um und entlang des Körpers gebunden ist – ein sehr eindrucksvolles Design. Die Kontraktion der Muskeln in der Körperwand bewirkt eine Erhöhung des internen Drucks, und der Wurm kann seine Form ändern, da die Fasern in seiner Haut es ihm erlaubt sich kurz und fett oder lang und dünn zu machen. So bewegt sich der Wurm fort.
Dieses unvergleichbare mechanische System inspiriert zurzeit neue Projekte am Zentrum für Biomimethik an der Reading Universität. In einem Experiment wurden Zylinder verschiedenster Faserwinkel entlang der Linie der Anatomie des Wurmes gelegt. Der Plan sieht vor diesen Zylinder mit einem Wasser absorbierenden Polymergel zu füllen. Wasser lässt dieses Gel expandieren. Auf diese Art wird chemische Energie in mechanische Energie an der richtigen Stelle umgewandelt, und der daraus resultierende Druck wird sicher in der spiralförmig gewundenen Tasche gehalten. Sobald die Schwellung und Kontraktion des Polymergels kontrolliert werden kann, hofft man, dass das daraus resultierende System wie ein künstlicher Muskel funktioniert.115
Jedes Lebewesen, das der Mensch als ein Model nimmt, und jedes darin enthaltene System, ist für die, die glauben, ein Zeichen Gottes.
Diese Wahrheit wird in folgendem Vers offensichtlich:
In der Erschaffung von euch und in den Tieren, die Er verbreitet hat,
finden sich Beweise für Leute, die ihres Glaubens gewiss sind.
(Quran, 45:4)
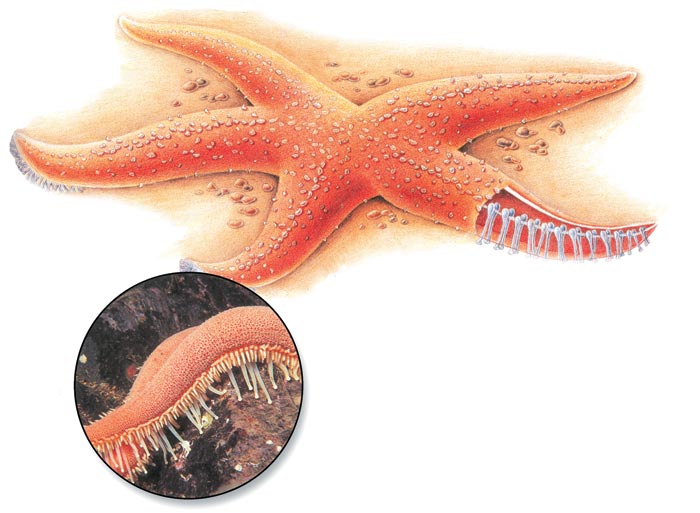 |
| Die Form zu ändern, sich aufblähen und zusammenziehen durch den Einsatz von Druck, wird sehr häufig in der Natur eingesetzt. Der Wurm, Oktopus, Seestern und Anemonen sind beste Beispiele dafür; Aber die Form zu ändern wird selten in technischen Geräten gefunden. In den wenigen existierenden Beispielen werden Hydraulikpressen eingesetzt. In Lifts zum Beispiel pumpen Hydrauliken Flüssigkeit in einen dünnen Zylinder, um schwere Objekte zu heben. Um den Lift herunterzulassen wird der Zylinder wieder geleert. Seesterne setzen zum Fortbewegen auch Hydraulikpressen ein. Unter der Innenseite der Arme besitzen die Stachelhäuter Röhrchen ähnliche Füße, die an ein internes, Flüssigkeitgefülltes Kanalsystem angeschlossen sind. Wenn die Muskeln diese Röhrchen zusammenziehen, schickt die Hydraulikpresse Flüssigkeit in den Fuß. Mit seinen Muskeln kann der Seestern die Hydraulikkraft nutzen, um Wellenbewegungen in den Armen zu erzeugen, sich vorwärts und zurück zu bewegen, und ermöglicht es dem Seestern in eine Richtung zu schwimmen. |
Die Füße des Geckos eröffnen neue technologische Horizonte

Diese kleinen Echsen sind in der Lage sehr schnell Wände hinauf zu laufen und sehr komfortabel an der Decke zu hängen. Bis vor kurzem haben wir nicht verstanden, wie es für ein Wirbeltier möglich sein kann, Wände hoch zu laufen wie der Cartoon und Filmheld Spiderman. Jetzt, nach Jahrelanger Forschung hat man endlich das Geheimnis gelüftet, worauf ihre außergewöhnlichen Fähigkeiten beruhen. Kleine Schritte der Geckos haben zu enormen Entdeckungen mit ungeheuren Auswirkungen geführt, besonders für Roboterdesigner. Einige können wie folgt zusammengefasst werden:
- Forscher in Kalifornien glauben, dass die "klebrigen" Füße der Echse dabei helfen kann, trockene, und selbstreinigende Kleber zu entwickeln.116
- Die Füße des Gecko generieren eine Klebkraft, die 600 Mal größer ist als die der Reibung. Gecko ähnliche Roboter könnten die Wände an brennenden Gebäuden hochklettern, um die eingeschlossenen zu retten. Trockene Kleber wären ein großer Vorteil für kleine Geräte in medizinischen Anwendungen und der Computertechnologie.117
- Ihr Füße fungieren wie Federn, die automatisch reagieren wenn man ihre Oberfläche berührt. Dies ist eine besonders passende Eigenschaft für Roboter, die kein Gehirn besitzen. Die Füße der Geckos verlieren niemals ihre Effektivität, egal wie oft sie gebraucht werden; sie reinigen sich von selbst und funktionieren sogar in einem Vakuum oder unter Wasser.118
- Ein trockener Kleber könnte schmierige Körperteile am Platz halten während einer Nano-Operation.119
- Solche Kleber könnten Autoreifen auf der Fahrbahn halten.120
- Gecko ähnliche Roboter könnten helfen Löcher in Schiffen, Brücken und Hafenmauern zu reparieren, und besonders bei der regulären Wartung von Satelliten.121
- Roboter, deren Füße denen des Geckos nachempfunden sind, könnten Fenster putzen, Boden und Decken wischen. Nicht nur könnten sie flache vertikale Oberflächen erklimmen, sondern auch jedem Hindernis auf dem Weg ausweichen.122
 |