Robotter Som Imiterer Levende Ting
Ligesom områder forurenet med radioaktivitet og dybt rum er havets dyb et farligt sted for mennesker. Forbedringer inden for elektronik og computerteknologi har gjort, at vi har kunnet konstruere robotter, som kan fungere på sådanne steder. Efterhånden adskilte denne disciplin sig fra elektronik og mekanik og dannede en videnskabsgren af sin egen – robotteknologi. Nu om dage har de, der arbejder med robotteknologi, et nyt koncept på deres dagsorden: biomimetik robotteknologi.
Videnskabsmænd og forskere involveret i robotteknologi tror nu, at det ikke er særlig praktisk at designe robotter til en specifik opgave. De ser det som lettere og mere meningsfyldt at bygge robotter, som imiterer egenskab og evner fra levende ting, hjemmehørende i miljøerne, hvor disse robotter skal bruges. Til ørkenudforskning vil de for eksempel skabe en biomimetik robot, som ligner en skorpion eller en myre. En bog kaldet Neurotechnology for Biomimetic Robots indeholder følgende information om dette emne:
Biomimetik robotter adskiller sig fra traditionelle robotter ved, at de er agile, relativt billige og i stand til at begive sig i miljøer fra den rigtige verden. Teknikken i disse robotter kræver en grundig forståelse for de biologiske systemer, som de baseret på, både på det biomekaniske og på det fysiologiske niveau.
… Det ultimative mål er at udvikle en i sandhed autonom robot, som er i stand til at navigere og interagere med sit miljø udelukkende på basis af sensorisk feedback uden tilskyndelse fra en menneskelig operatør. 103
Det, der førte forskere til at imitere levende ting, var deres fejlfri fysiske designs. Ingeniør Hans J. Schneebeli, designer af robotapparatet kendt som Karlsruhe Hånden, sagde, at jo mere han arbejdede med robothænder, jo mere beundrede han den menneskelige hånd. Han tilføjede, at de stadig skulle bruge meget tid på at kopiere bare nogle få af de mange opgaver, som en menneskelig hånd kan klare.104
Nogle gange må forskere fra så forskellige discipliner som computerteknologi, mekanik, elektronik, matematik, fysik, kemi og biologi gå sammen for at kopiere bare en egenskab fra et levende væsen. Men evolutionistisk tankegang vedholder stadig, at den enestående komplekse struktur hos levende ting kunne være kommet uplanlagt til, helt af sig selv.
 |  |  |
Robotteknologi Imiterer Slanger For At Overkomme Balanceproblemet
For de, der beskæftiger sig med robotteknologi, er et af de problemer, de oftest møder, at bevare ligevægten. Selv robotter udstyret med den nyeste teknologi kan miste deres balance, når de går. Et treårigt barn kan klare at genoprette balancen uden besvær, men robotter, som ikke har denne evne, er af nødvendighed stillestående og ikke til meget brug. Faktisk kunne en robot, som NASA klargjorde til tjeneste på planeten Mars, slet ikke bruges af lige præcis den grund. Efter det opgav roboteksperter forsøg på at bygge en balanceoprettende mekanisme og kiggede i stedet på et væsen, som aldrig mister balancen – slangen.
I modsætning til andre hvirveldyr mangler slanger en hård rygrad og lemmer, og er blevet skabt på den måde for at kunne komme ind i revner og sprækker. De kan udvide og sammentrække deres kroppes diameter, kan klamre sig til grene og glide over sten. Slangers egenskaber inspirerede en ny robotteknologisk, interplanetarisk sonde udviklet af NASAs Ames Forskningscenter, som de kaldte ”snakebot”. Denne robot blev altså designet til at være i et konstant balancestadie uden nogensinde at blive fanget af forhindringer.105
 |  |
Balancecentrer I Det Indre Øre Forbløffer Roboteksperter
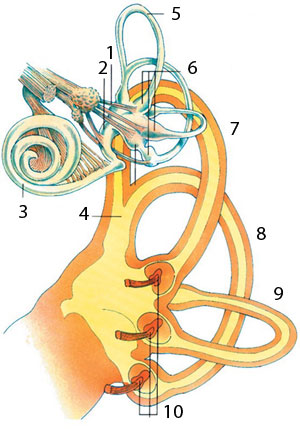 | |
| 1. Ampullary nerves | 6. Ampullae |
Det indre øre spiller en vital rolle i vores balancesystem, da det kontrollerer hele vores krop i hvert øjeblik og gør, at vi kan udføre de delikate justeringer, der for eksempel kræves af en linjedanser.
Balancecentret i det indre øre, kendt som labyrinten, består af tre små semicirkulære kanaler. De er 6,5 mm (0,25 in) i diameter, og tværsnittet af det hule rum i dem måler 0,4 mm (0,016 in). De tre ligger i ortogonale planer. En individuel kanal mærker rotationer i en af tre ortogonale retninger. Altså kombinerer de tre kanaler deres resultater og giver evnen til at fornemme rotationer i enhver retning i tredimensionelt rum.
Inden i hver af disse kanaler er en viskøs væske. I en ende af røret er der en geléagtig hætte (cupula), som sidder på et bulende område (crista) dækket med sensoriske hårceller. Når vi drejer vores hoved, går, eller laver nogen bevægelse, halter væsken i disse kanaler bagud på grund af inerti. Væsken trykkes mod cupulaen og afbøjer den. Denne afbøjning måles af hårcellerne i cristaen, da hårenes vibrationer ændrer ion balancen i de celler, der er forbundet til dem, og producerer elektriske signaler.
Disse signaler produceret i det indre øre sendes ved hjælp af nerver til lillehjernen bagest i vores hjerne. Disse sendernerver fra labyrinten til lillehjernen har vist sig at indeholde 20.000 nervefibre.
Lillehjernen fortolker denne information fra labyrinten, men for at bevare balancen behøver den også anden information. Derfor modtager lillehjernen konstant information fra øjnene og fra musklerne i hele kroppen, analyserer lynhurtigt denne information og beregner kroppens position relativt til tyngekraften. Baseret på disse øjeblikkelige beregninger giver den så via nerverne musklerne besked om de præcise bevægelser, de skal gøre, for at bevare balancen.
Disse enestående processer sker på mindre end en hundreddel af et sekund. Vi er i stand til at gå, løbe, køre på cykel og dyrke sport uden overhovedet at være klar over, at alt dette sker. Men hvis vi skulle nedskrive på papir alle de beregninger, der foregår i vores krop i et øjeblik, ville formlerne fylde tusindvis af sider.
Totalt fejlfrit fungerer vores balancesystem ved hjælp af flere meget komplekse mekanismer, som alle er sammenkoblede og arbejder sammen. Moderne videnskab og teknologi har endnu til gode at afklare alle detaljerne i deres operative principper og at imitere dem.
Det er selvfølgelig umuligt for sådan et komplekst design at være opstået ved tilfælde, som evolutionsteorien vil have os til at tro. Hvert design afslører eksistensen af en bevidst designer. Vores balance systems overlegne design er endnu et bevis på eksistensen af Gud, Som skabte det system så gennemført, og på Hans uendelige viden.
I lyset af denne realisation er det menneskets ansvar at takke Gud, Som gav dem sådan en struktur.
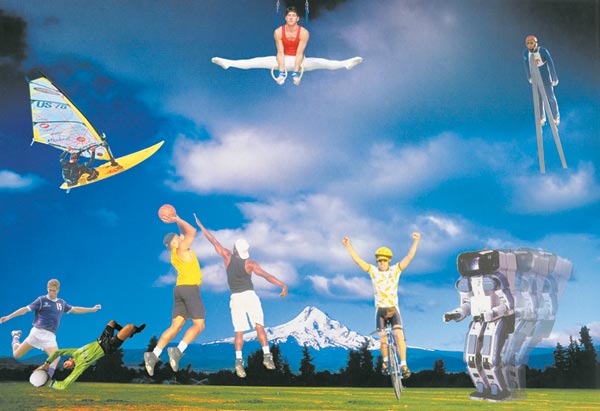 |
| Balance is brought about by a most extraordinarily complicated system, since the human body is in constant motion. That means the brain must constantly recalculate the body’s center of gravity, and send instructions to the muscles in light of this. |
En Robotskorpion I Stand Til At Modstå Hårde Ørkenforhold
I USA arbejder Defense Advanced Research Projects Agency (DARPA) på at udvikle en robotskorpion. Grunden til, at projektet valgte en skorpion som sin model er, at robotten skulle fungere i ørkenen. Skorpioner har været i stand til at overleve hårde ørkenforhold lige siden deres skabelse. Men en anden grund til, at DARPA valgte en skorpion, var, at samtidig med, at den kan bevæge sig gennem hårdt terræn meget let, er dens reflekser meget simplere end dem hos pattedyr – den kan imiteres.106
Før de udviklede deres robot, bruge forskerne lang tid på at observere bevægelserne hos levende skorpioner ved at bruge højhastigheds kameraer, og analyserede videodataet.107 Senere blev skorpionens bens koordination og organisering brugt som udgangspunkt for modellens skabelse.
DARPAs mål er at få sin 50 cm (20 in) robotskorpion til at nå et mål 40 km (25 mil) væk i ørkenen og så vende tilbage – helt på egen hånd, uden at modtage nogen instruktioner.108
 |  |
Robotten er designet af Frank Kirchner og Alan Rudolph på Northeastern University i Boston, og har ingen evne til at ”gennemtænke” komplekse problemer. Når den møder en forhindring bruger den udelukkende sine reflekser. Dette gør, at den kan overkomme enhver forhindring, der måske hindrer dens fremgang – en sten for eksempel. Foran har robotten to ultrasoniske sensorer. Skulle den møde en forhindring, der er mere end halvt så høj som den, vil den prøve at gå rundt om. Hvis detektoren til venstre identificerer en forhindring, vil den gå til højre. Robotten kan blive bedt om at gå til en specifik region, og sende billeder af stedet tilbage til basen ved hjælp af kameraet i dens hale.
Den amerikanske hær var meget imponeret over prøverne foretaget i Arizona. Man håber, at robottens evne til at finde vej til et mål, især kan være brugbart i tætpakkede slagmarker såsom byer. 109
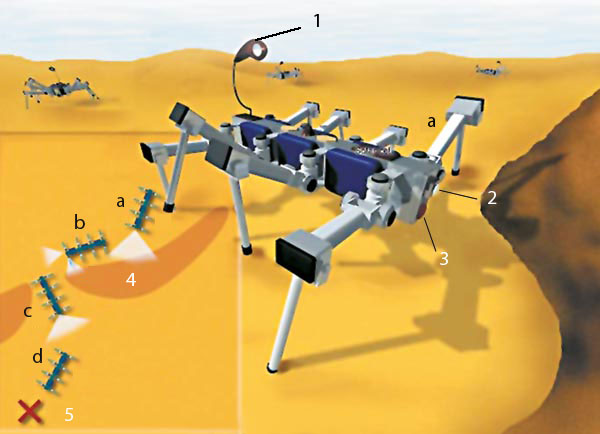 | ||
| 1. Camera and radio connections | 3. Infrared sensors | 5. Target |
| a. When the robot scorpion encounters a rock, first it scans it with ultrasound to decide whether it’s too high to climb. | ||
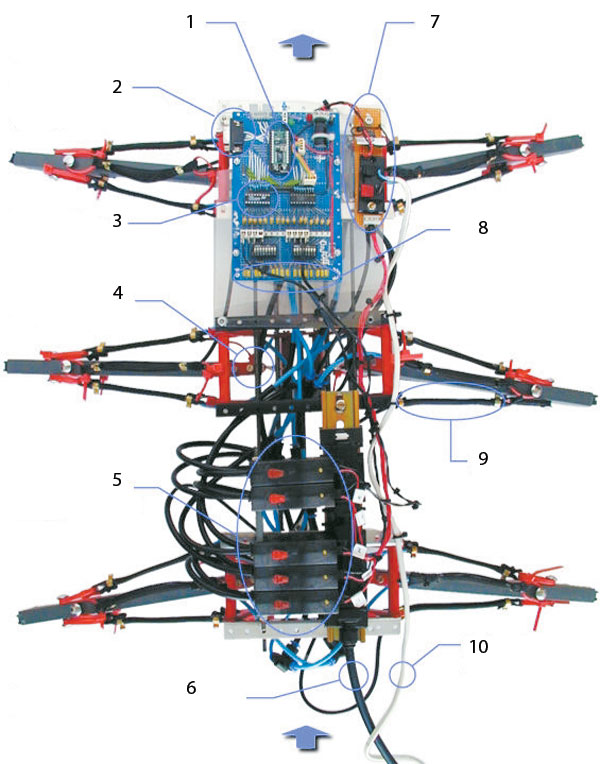 | |
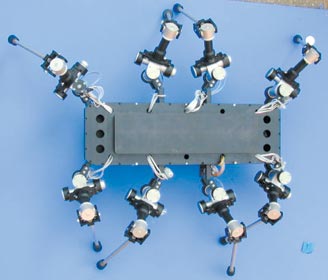
| 1. Control chip, which determines which step will be taken first | 6. External air cable, which feeds the air valves with 6-bar air |
| The scorpion robot, built using advanced technology, possesses a complex structure. Even though a great many scientists and engineers worked on this robot, it can only travel towards a pre-established target. | |
Ligesom En Ægte Hummer Vil Denne Robot Identificere Vandstrømme
Selv fuldt udstyrede menneskedykkere har svært ved at bevæge sig gennem turbulent og beskidt vand, kravle langs bunden, hvor der kan være hårdt, sandet eller dækket med alger. Hummere kan, og endda meget let. Men indtil videre har ingen robot, bygget til brug på havbunden, været succesfuld i sådanne miljøer.
Joseph Ayers, Direktør for the Marine Science Center på Northeastern University i Boston, leder et projekt for at udvikle en robot, der imiterer hummeren. Som han beskriver det, er projektets ”tekniske mål at fange de præstationsfordele, som dyrenes systemer har i det eftertragtede miljø.”110
De forventer at bruge denne ”robo-hummer” til at finde og afvæbne miner. Ayers siger, at robotten vil være ideelt tilpasset denne slags arbejde:
… rækken af adfærdsmæssige handlinger, som en hummer udfører, når den leder efter med, er præcis, hvad man vil have, at en robot skal udføre for at finde og neutraliserer undervandsminer.111
Hummerens form hjælper den med ikke at vælte eller bevæge sig i vand, der bevæger sig hurtigt. De er i stand til at fortsætte i den retning, de vil, under selv de sværeste forhold, selv over meget groft terræn. På samme måde vil robo-hummeren bruge sin hale og sine klør til stabilitet.
På robotten imiterer mikroskopiske elektromekaniske sensorer (MEMS) hummerens sensoriske organer. Udstyret med vandstrømsensorer og antenner kan robotten tilpasse sine bevægelser til vandstrømmene omkring den. En levende hummer bruger hår til at bestemme strømmes retning, og robot hummerens elektromekaniske sensorer forventes at gøre det samme.112
 | 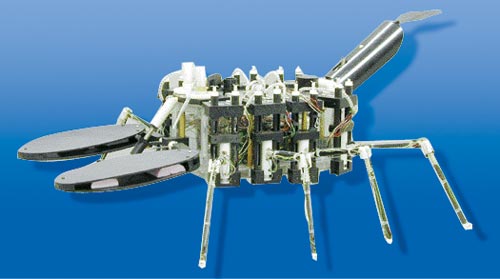 |
| Lobster | Robo-lobster |
Hummerens Teknik Til At Identificere Lugte

Undervandsvæsner såsom krabber og hummere bruger deres lugtesans til at finde mad, mager eller til at flygte fra rovdyr. Et studie udført af forskere fra University of California ved Berkeley og Stanford afslørede, hvordan hummere lugter verdenen omkring dem.
Hummere besidder en meget følsom lugtesans, hvis egenskaber vil åbne nye horisonter for robotteknikere, der prøver at bygge nye lugtsensorer. Mimi A. R. Koehl, en professor i integrativ biologi på the College of Letters & Science ved University of California, Berkeley, siger:
Hvis du vil bygge ubemandede køretøjer eller robotter, der skal gå ind på giftige områder, hvor du ikke vil sende en dykker hen, og hvis du vil have, at de robotter skal lokalisere noget ved at lugte, så må du designe næser eller olfaktoriske antenner til dem.113
Hummere og andre krebsdyr lugter ved at svippe et sæt antenner mod lugtens kilde, så de kemosensoriske hår på spidsen af antennerne kommer i kontakt med de vandbårne lugtmolekyler. Langusteren Panulirus argus, som lever i det Caribiske Hav, har antenner på 30 cm (3 til 4 inches) i længden. Yderst på en af de splittede spidser på antennerne er der hår, som ligner en børste – en region, der er særligt følsom overfor kemikalier.
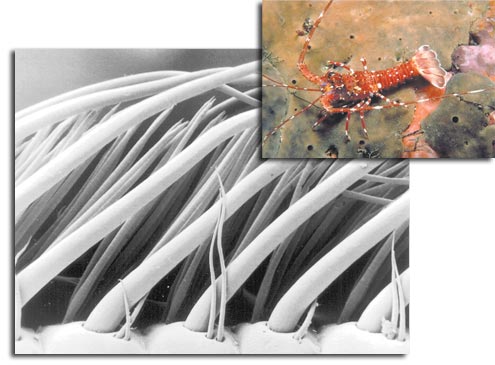 |
| Hairs on the lobster antennule |
En gruppe forskere anført af Professor Koehl lavede en mekanisk hummer, som svippede sine antenner på samme måde. Tests og observationer af denne robot, døbt Rasta Lobsta, blev udført for detaljeret at undersøge den teknik, som hummere bruger for at kunne lugte.
Når hummeren vil lugte noget, skubber den i den nedadgående bevægelse antennerne gennem vandet hurtigt nok til, at vandet, der indeholder lugten, løber gennem børsten af sensoriske hår. På tilbagevejen fejer den dem dog langsommere, så vandet ikke kan bevæge sig mellem hårene, og lugtområdet, som penetrerede mellem hårene under nedslaget, fanges indtil det næste hurtige nedslag.
Antennerne bevæger sig forud og bagud med den ideelle hastighed, for at hummeren skal kunne lugte. Tests har vist, at hvis antennerne bevægede sig langsommere, så ville vandet ikke flyde mellem hårene, og dette vil reducere krebsdyrets evne til at lugte. Derfor bruger den antennerne på en sådan måde, så den er i stand til at bevare og fange selv små forskelle i lugtkoncentration i vandområdet.114
Strukturen I Orm Muskler Fører Vej Til Nye Mekaniske Systemer
Huden, der dækker en orms cylindriske krop, består af fibre, som er viklet i en krydslagt spiralform omkring og langs kroppen – et meget imponerende design. Koncentrationen af muskler i kropsvæggen fører til en øgning af det interne tryk, og ormen er i stand til at ændre form, da fibrene i huden gør, at den kan gå fra kort og tyk til lang og tynd. Dette er basis af, hvordan orme bevæger sig.
Dette mageløse mekaniske system inspirerer nu nye projekter på Reading Universitys center for biomimetik. I et eksperiment blev cylindre med diverse fibervinkler arrangeret i samme stil som ormens anatomi. Planen er at fylde disse cylindre med en vandabsorberende polymergel. Vand gør, at denne gel udvider sig. På denne måde konverteres kemisk energi til mekanisk energi lige på det rette sted, og det resulterende tryk vil opbevares sikkert indeni den spiralviklede pose. Når opsvulmningen og sammentrækningen af polymergelen kontrolleres, håber man, at det resulterende system vil fungere som en kunstig muskel.115
Enhver levende ting, som mennesker bruger som model, og ethvert system i den, er et tegn på Gud for de, der tror. Denne sandhed udtrykkes i et vers:
 |
| I skabelsen af jer og i det, som Han lader udbrede sig af dyr, |
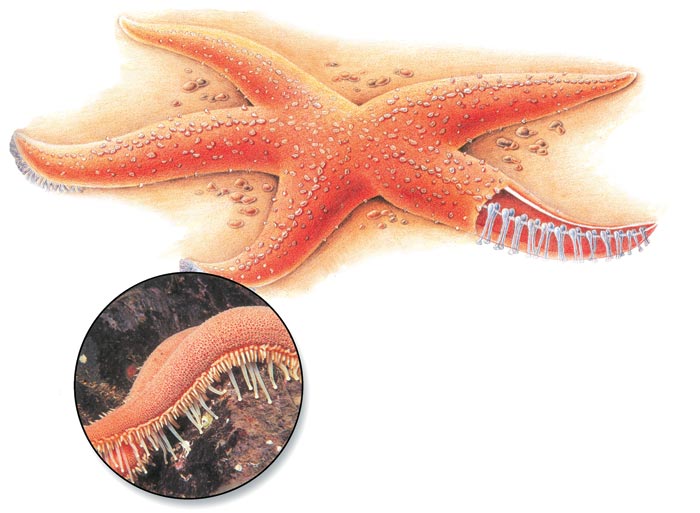 |
| Changing shape, expanding and contracting by the use of pressure, is frequently used in nature. The worm, octopus, starfish and anemone are some of the best examples; yet shape-changing is found much less frequently in technological equipment. In those few examples that do exist, hydraulic pressure is employed. In lifts, for example, hydraulic liquid is pumped into a thin cylinder to raise heavy objects. To lower the lift, the cylinder is emptied again. Starfish also use hydraulic pressure to move. Along the undersides of its arms, the echinoderm possesses tube-like feet, attached to an internal, fluid-filled tubing system. When its muscles contract the tubes, the resulting hydraulic pressure sends fluid to the feet. Using its muscles, the starfish uses hydraulic power to set up a wave motion in its feet, moving forward and back and allowing the starfish to progress in one direction. |
Gekkoens Fødder Åbner Nye Teknologiske Horisonter

Disse små øgler er i stand til at løbe meget hurtigt op ad vægge og gå rundt, hvor de sidder fast i loftet, meget bekvemt. Indtil for nylig forstod vi ikke, hvordan de kunne være muligt for noget hvirveldyr at klatre op ad vægge ligesom tegneserie- og filmhelten Spiderman. Nu har årevis med forskning endelig afsløret hemmeligheden, som deres enestående evne afhænger af. Gekkoens små skridt har ført til enorme opdagelser med voldsomme implikationer, især til robotdesignere. Nogle få kan opsummeres som følger:
- Forskere i Californien tror, at øglens "klistrende" tæer, kan hjælpe med at udvikle et tørt og selvrensende klædemiddel.116
- Gekkoens fødder danner en klæbrig kraft, der er 600 gange større end friktion. Gekkolignende robotter kunne klatre op ad vægge på brændende bygninger for at redde dem indenfor. Tørre klæbemidler kunne være til stor fordel i små apparater, såsom i medicinske applikationer og computerarkitektur.117
- Deres ben opfører sig som fjedre, der automatisk reagerer, når de rører en overflade. Dette er især en passende egenskab for robotter, som ikke har nogen hjerne. Gekkoers fødder mister aldrig deres effektivitet, lige meget hvor meget de bruges: de er selvrensende, og de fungerer også i et vakuum eller under vand.118
- Et tørt klæbemiddel kunne hjælpe med at holde glatte kropsdele på plads under nanokirurgi. 119
- Sådan et klæbemiddel kunne holde bildæk fast på vejen.120
- Gekkolignende robotter kunne bruges til at reparere sprækker i både, broer og bropiller, og i den almindelige vedligeholdelse af satellitter.121
- Robotter modelleret efter gekkoens fødder kunne bruges til at vaske vinduer, rense gulve og lofter. De vil ikke kun kunne klatre op ad flade, vertikale overflader, men overkomme enhver forhindring, de møder på vejen.122
 |
Noter
103 Joseph Ayers, Joel L. Davis and Alan Rudolph, "Neurotechnology for Biomimetic Robots;" http://mitpress.mit.edu/catalog/item/default.asp?sid=059CE164-6183-4410-8320-D5828734B95A&ttype=2&tid=8812
104 For further information see Harun Yahya's For Men of Understanding, Ta Ha Publishers, April 2003.
105 Kevin Bonsor, "How Snakebots will Work," Howstuffworks; http://www.howstuffworks.com/snakebot.htm
106 Duncan Graham-Rowe, "Walk like a scorpion," NewScientist; 21 April 2001.
107 "Biological Analysis," AIS Approach; http://ais.gmd.de/BAR/SCORPION/biology.htm
108 Ibid.
109 Duncan Graham-Rowe, "Walk like a scorpion," NewScientist; 21 April 2001.
110 Yvonne Carts-Powell, "Robots mimic living creatures," OE Reports; http://www.spie.org/web/oer/september/sep00/cover1.html
111 Ibid.
112 Ibid.
113 Robert Sanders, "Lobster sniffing: how lobsters' hairy noses capture smells from the sea," UC Berkeley Campus News, November 30, 2001; http://www.berkeley.edu/news/media/releases/2001/11/30_lobst.html
114 Ibid.
115 Projects at the Centre for Biomimetics; http://www.rdg.ac.uk/Biomim/projects.htm
116 BBC News Online, June 7, 2000; http://news.bbc.co.uk/low/english/sci/tech/newsid_781000/781611.htm
117 World Wealth International, vol. 1, no. 1, February 2001; http://www.worldwealth.net/samplemag/ArticleGeckoPrint.html
118 Fenella Saunders, "Robo-Geckos," Discover, September 2000, vol. 21, no. 9
119 Ibid.
120 Ibid.
121 Ibid.
122 Ibid.
- Introduktion
- Intelligente Materialer
- Designet I Planter Og Biomimetik
- Gearkasser Og Jetmotorer I Naturen
- Brug Af Bølger Og Vibrationer
- Levende Ting Og Flyveteknologi
- Hvad Vi Kan Lære Fra Dyr
- Organer, Der Er Teknologien Overlegen
- Biomimetik Og Arkitektur
- Robotter Som Imiterer Levende Ting
- Teknologi I Naturen
- Konklusion